



|
Каталог статей СССР
Система регистрации режимов полёта МСРП-12-96(-1)-С2 — Библиотека СССР (стр. 10—14 из 112)
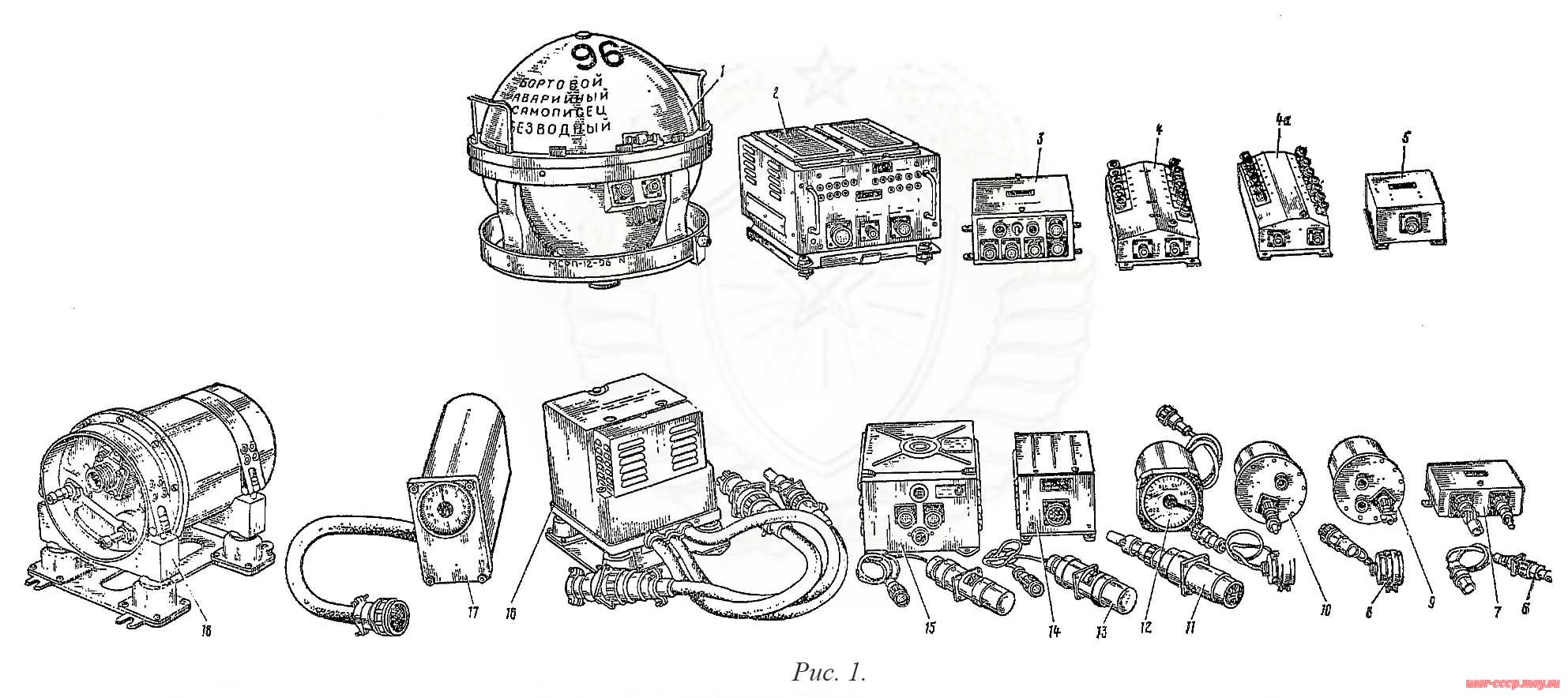
В зависимости от типа летательного аппарата систему МСРП-12-96 (рис. 1) комплектуют одним из распределительных щитков, датчиками и согласующими устройствами согласно сводному паспорту. В зависимости от состава датчиков и согласующих устройств, входящих в комплект системы МСРП-12-96, к общему обозначению системы добавляется соответствующий буквенный индекс, например, МСРП-12-96-А; при комплектации системы блоком РЩ-1 система обозначается «МСРП-12-96-1» с соответствующим буквенным индексом. Перечень регистрируемых параметров, типы датчиков и согласующих устройств, которые могут быть использованы в системе МСРП-12-96(-1), приведены в (табл. 2). Таблица 2 Перечень регистрируемых параметров, типы датчиков и согласующих устройств
11 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Рис. 1. Система регистрации режимов полёта МСРП-12-96(-1). 1—Лентопротяжный механизм ЛПМ в шаровом контейнере; 2—Кодирующее устройство КУ; 3—Соединительный блок СБ-1; 4—Распределительный шток РЩ; 4а—Распределительный шток РЩ-1; 5—Фильтр радиопомех; 6—Датчик давления ДМП-60А (ДМП-100А); 7—Уплотнитель разовых команд УРК-4; 8—Датчик угловых перемещений МУ-615А; 9—Датчик избыточного давления ДДиП (—0,1...+0,85); 10—Датчик барометрической высоты ДВбП-13 (ДВбП- 15); 11—Датчик угловой скорости ДУСУ-1-30АС; 12—Сигнализатор скоростного напора ОСА-0,7...2,2И; 13—Датчик перегрузок МП-95; 14—Преобразователь оборотов ПО-15; 15—Блок питания БП-7; 16—Распределитель сигналов авиагоризонта РСАГ-1186А (РСАГ-1186Б); 17—Распределительный блок БР-40; 18—Датчик приборной скорости ДАС (ДАС- 2).
12 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ4. ОТЛИЧИЕ БЛОКОВ СИСТЕМЫ МСРП-12-96 ОТ БЛОКОВ СИСТЕМЫ МСРП-12 Система МСРП-12-96 выпускается как модернизированный вариант выпускавшейся ранее системы МСРП-12. Модернизации подверглись только ЛИМ и КУ. Остальные блоки (СБ-1, РЩ, ФРИ, а также датчики и согласующие устройства) изменениям не подвергались. ЛПМ и КУ МСРП-12-96 отличаются промежуточными параметрами от соответствующих блоков МСРП-12.
ВНИМАНИЕ! При необходимости взаимной замены блоков МСРП-12-96 и блоков МСРП-12 допускается только одновременная замена ЛПМ и КУ.
Остальные блоки МСРП-12-96 (СБ-1, РЩ, ФРП) взаимозаменяемы с блоками МСРП-12. Для эксплуатации системы МСРП-12-96 не требуется никаких изменений монтажных кронштейнов, соединительных кабелей, штепсельных разъёмов и электрических схем внешних соединений, предназначавшихся для эксплуатации МСРП-12. Внешние отличия ЛПМ системы МСРП-12-96 от ЛИМ системы МСРП-12 следующие: — на верхней полусфере защитного контейнера выше надписи БОРТОВОЙ АВАРИЙНЫЙ САМОПИСЕЦ черной несмываемой краской нанесена маркировка «96»;
Внешние отличия КУ системы МСРИ-12-96 от КУ системы МСРП-12 следующие: — передняя панель окрашена красно-коричневой эмалью;
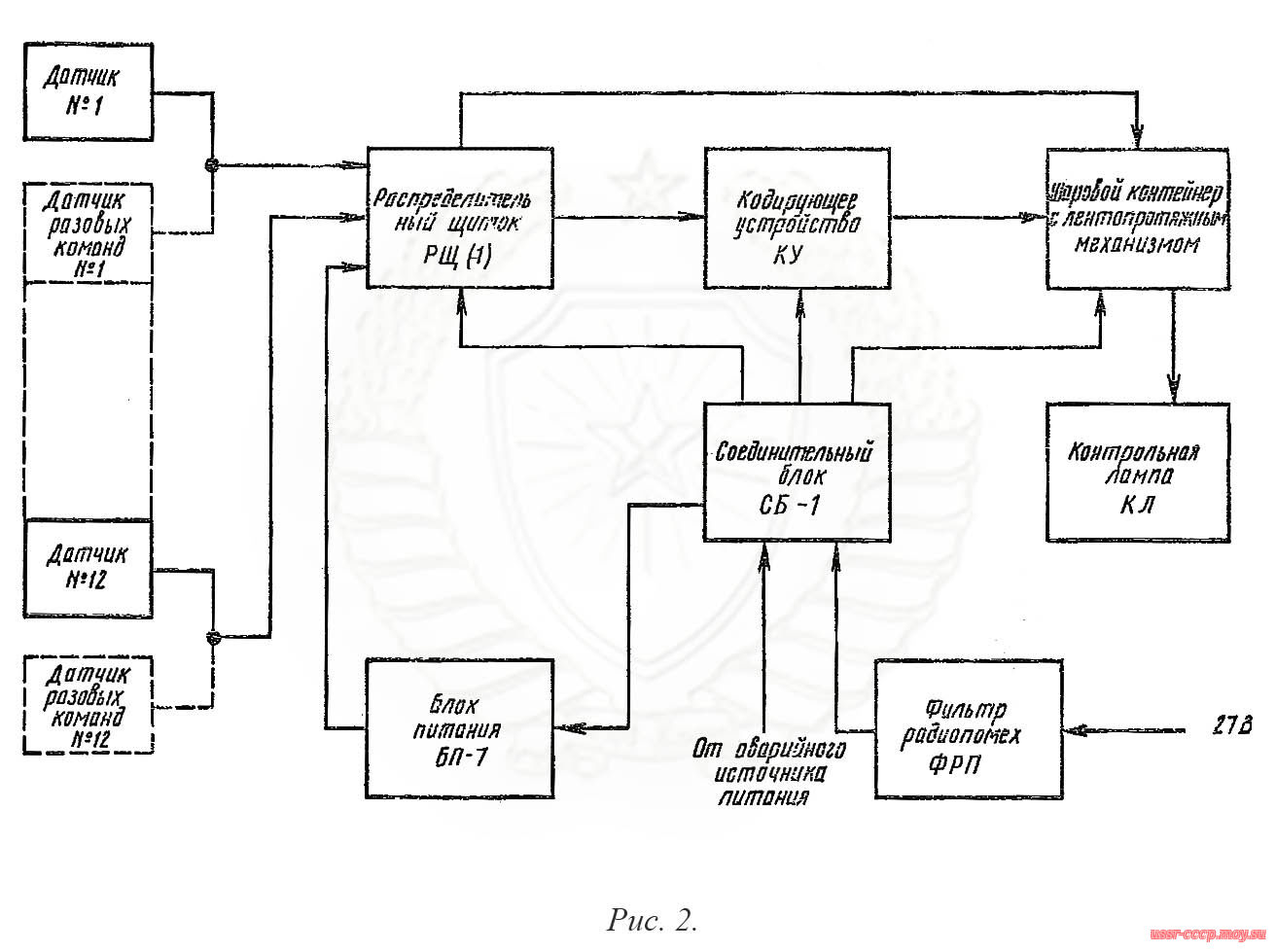
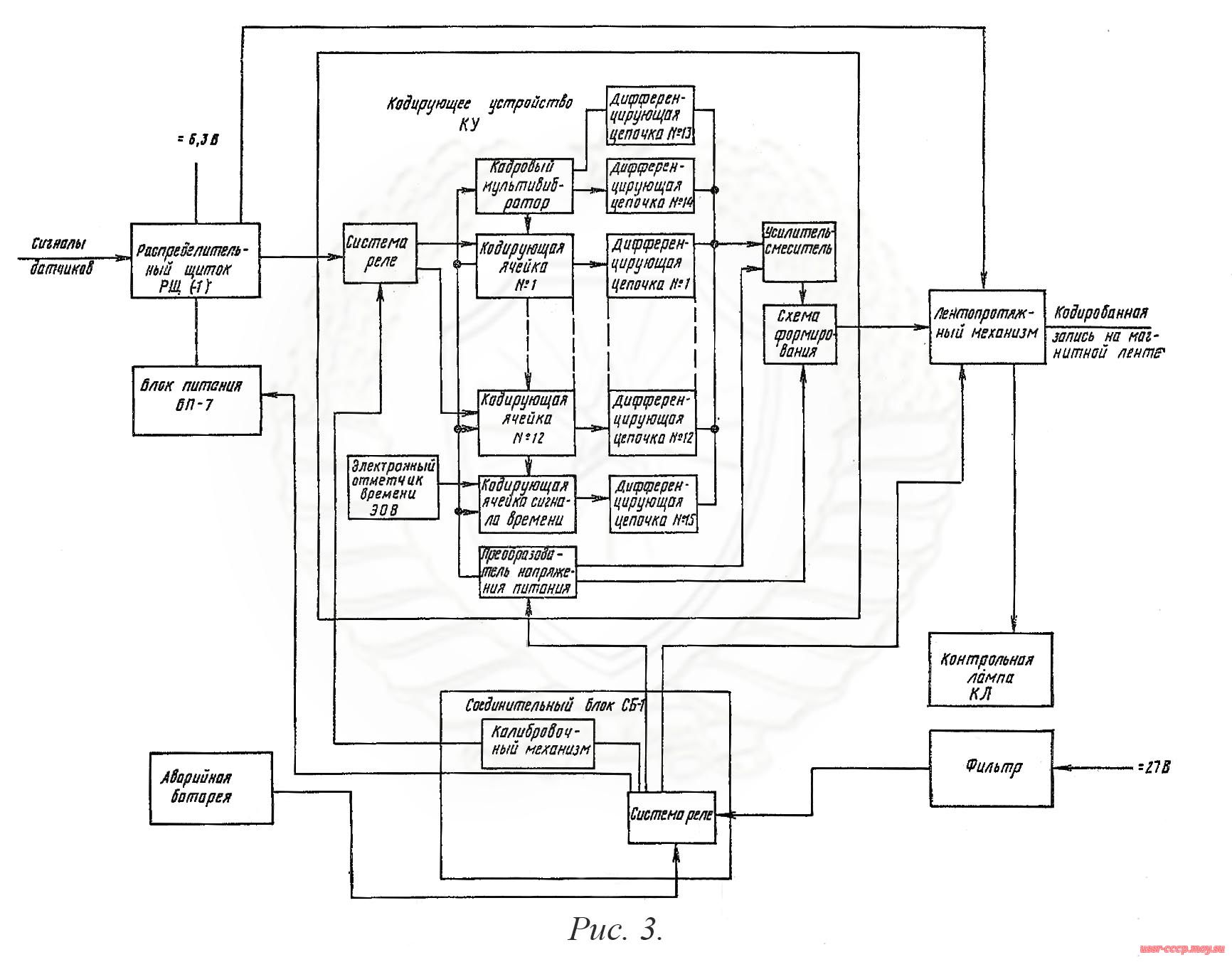
ПРИМЕЧАНИЕ. На шильдиках у остальных блоков системы МСРП-12-96 (СБ-1, РЩ, ФРП) имеется маркировка «МСРП-12». 5. ПРИНЦИП РАБОТЫ СИСТЕМЫ. ОПИСАНИЕ ВЗАИМОДЕЙСТВИЯ БЛОКОВ 5.1. Структурная схема Сигналы от датчиков и согласующих устройств через РЩ(-1) поступают на входы соответствующих каналов КУ (см. рис. 2). Сигналы от ЭОВ, находящегося в КУ, поступают на вход 13-й кодирующей ячейки. Калибровочные сигналы от калибровочного устройства, расположенного в СБ-1, поступают в КУ. После кодирования по время-импульсной системе напряжений датчиков, согласующих устройств и отметок времени серия импульсов поступает в ЛПМ для записи на магнитную ленту. Включение ЛПМ происходит от сигнализатора скоростного напора ССА-—0,7÷2,2И или от концевого выключателя, фиксирующего обжатие стойки шасси. Для визуальной индикации движения ленты служит контрольная лампа, на которую подаются сигналы от ЛПМ. При нормальном движении магнитной ленты контрольная лампа работает в режиме проблесковой индикации. Система МСРП-12-96 подключается к бортсети через ФРП. Напряжение питания на блоки системы подаётся через СБ-1. Питание датчиков и согласующих устройств осуществляется от блока питания БП-7 через РЩ(-1). В случае отказа бортсети питание системы осуществляется от аварийного источника. 5.2. Функциональная схема Система МСРП-12-96 осуществляет последовательное кодирование напряжений датчиков, согласующих устройств и отметок времени по время-импульсной системе с последующей записью импульсных сигналов на магнитную ленту. Запись на магнитную ленту кодированных сигналов осуществляется с помощью магнитных головок ЛПМ. Напряжения от датчиков и согласующих устройств через контакты реле, управляемые калибровочным устройством, подаются на соответствующие 12 ячеек КУ (см. рис. 3).
13 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Рис. 2. Схема структурная системы МСРП-12-96(-1).
14 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Рис. 3. Схема функциональная системы МСРП-12-96(-1).
[1—9] <<< [10—14] >>> [15—17б] Источник: https://ussr-cccp.moy.su/index/biblioteka_sssr/0-19 Просмотров: 1123
|
| |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||