АГИ-1 (2-й серии) — Авиагоризонт — Гироскопический прибор СССР (стр. - 02) АГИ-1 (2-й серии) — Авиагоризонт — Гироскопический прибор СССР (стр. - 02)
Статья под цифровой редакцией подготовлена: Орловым Геннадием Викторовичем (08.11.1965) — Советским выдающимся публицистом СССР — Прозаиком СССР — Историком СССР
Страницы [01] [02] [03] [04] [05] [06]
Силуэт самолёта 2 (см. рис. 2) и шкала крена 6 связаны с корпусом прибора, а индекс-горизонт 4 и шкала тангажа 5 нанесены соответственно как экваториальная и меридиональная линии на сферической шкале 3, связанной с гироскопом.
Такое расположение указывающих элементов авиагоризонтов позволяет лётчику определять пространственное положение самолёта:
а) по углу крена, который указывает линия меридиана 5 на шкале крена 6;
б) по углу тангажа, который указывает центр силуэта самолётика на шкале тангажа 5 (линии меридиана).
Эта особенность авиагоризонта АГИ-1 (2-й серии) даёт возможность лётчику:
а) контролировать режим горизонтального полёта самолёта;
б) контролировать точность выполнения всех эволюций самолёта, включая фигуры высшего пилотажа (развороты, виражи, боевые развороты, горки, пикирование, бочки, петли и полупетли Нестерова, перевороты и т. п.);
в) при потере пространственной ориентировки по показаниям углов крена и тангажа выводить самолёт в линию горизонтального полёта.
П р и м е ч а н и е. При пикировании и подъёме с углами 80—90º угол крена по прибору (угол поворота вокруг продольной оси самолёта) контролировать нельзя. В этой зоне прибор не чувствителен к изменениям углов крена. На сферической шкале зона нечувствительности обозначена в виде кружков (как на коричневой полусфере, так и на голубой).
4. Погрешность показаний авиагоризонта АГИ-1 (2-й серии) при развороте самолёта на любой угол в пределах 360º, выполняемый с любым креном от 15 до 75º, не превышает 3—4º.
При полётах в сложных метеоусловиях и ночью необходимо, чтобы авиагоризонт после виражей имел небольшие погрешности. Эти погрешности создаются в основном за счёт того, что коррекционное устройство во время виража не поддерживает вертикальное направление оси гироскопа, а наоборот, уводит её в сторону равнодействующей ускорения силы тяжести и центростремительного ускорения.
Для того чтобы избавиться от вредного воздействия коррекционного устройства на гироскоп при вираже, в авиагоризонте АГИ-1 (2-й серии) применяется выключение поперечной коррекции.
П р и м е ч а н и е: В авиагоризонте АГИ-1 (2-й серии) поперечная коррекция выключается специальным устройством, расположенным на оси следящей рамы, при вираже самолёта с креном 13º.
Кроме того, для увеличения устойчивости прибора в нём применён гиромотор с большим кинетическим моментом (4000 Г • см • сек).
Выключение поперечной коррекции и применение гироскопа с большей устойчивостью позволило уменьшить погрешности после виражей до величины не более 3—4º (для виражей с креном более 15º).
5. Прибор АГИ-1 (2-й серии) имеет увеличенную чувствительность показаний к изменению показаний углов тангажа.
Размеры указывающих элементов авиагоризонтов сферической шкалы 3 (см. рис. 2) силуэт самолётика 2 выбраны такими, чтобы обеспечить требования необходимой величины чувствительности показаний прибора к изменениям угла тангажа.
Электрокинематические схемы авиагоризонта АГИ-1 (2-й серии)
Для определения положения самолёта относительно плоскости истинного горизонта необходимо иметь на самолёте элемент, сохраняющий своё положение относительно земли неизменным независимо от крена самолёта, т. е. элемент, который бы непрерывно указывал земную вертикаль. Самым простым таким элементом является маятник. Однако использовать маятник на самолёте для непосредственного определения истинной вертикали нельзя. При наличии ускорений (кроме ускорения силы тяжести) маятник располагается по направлению равнодействующей ускорений (по направлению «кажущейся вертикали»). Кроме того, после прекращения действия ускорения маятник будет колебаться около вертикального положения, что затруднит измерение.
Свободный трёхстепенный гироскоп не подвержен действию ускорений. Однако использовать его для указания истинной вертикали также не представляется возможным. Главная ось свободного гироскопа, будучи в начале установленной по вертикали, с течением времени будет отклоняться от неё под действием вращения Земли, трения в осях подвеса, несбалансированности и т. п..
Поэтому для указания вертикали на самолёте применяется комбинация из трёхстепенного гироскопа и маятниковой коррекции, которая определяет истинную вертикаль и создаёт на осях подвеса гироскопа моменты, вызывающие медленные (прецессионные) движения главной оси гироскопа к вертикальному направлению. Такая комбинация свободного гироскопа и маятниковой коррекции использована и в авиагоризонте АГИ-1 (2-й серии).
Кроме того, как указывалось выше, в гиросистеме авиагоризонта применена специальная следящая система, которая позволяет сохранять устойчивость гироскопа максимальной независимо от углов крена и тангажа самолёта.
На (рис. 7) показана электрокинематическая схема прибора АГИ-1 (2-й серии).
Гиромотор 1 представляет собой асинхронный двигатель трёхфазного тока с частотой 400 гц и напряжением 36 в. Обмотка статора гиромотора имеет одну пару полюсов и, когда на неё подаётся питание, она создаёт вращающееся магнитное поле с числом оборотов в минуту 24000. Это вращающейся магнитное поле, пересекая короткозамкнутые витки типа беличьей клетки ротора, заставляет ротор вращаться в ту же сторону , что и поле. Скорость вращения ротора 21000—22000 об/мин. Ротор вращается против часовой стрелки (если смотреть на прибор сверху).
Гиромотор помещён в корпусе 2. На корпусе 2 гиромотора укреплён чувствительный элемент коррекционного устройства гироскопа — жидкостный маятниковый переключатель 3, который имеет две пары контактов, расположенных в герметичном баллоне, заполненном токопроводящей жидкостью. Имеющийся в баллоне пузырёк воздуха перемещается относительно контактов в зависимости от наклона жидкостного переключателя и соответственно меняет проводимость этих четырёх контактов. Жидкость находится под напряжением фазы В.
С корпусом гиромотора связан статор 4 продольного коррекционного мотора, который является одним из двух силовых элементов коррекции гироскопа. Статор состоит из пакета пластин электротехнической стали. В пазы пакета заложены две обмотки: обмотка возбуждения включена последовательно в фазу Б, обмотка управления со средней точкой сдвинута геометрически относительно первой на 90º.
Концы обмотки управления статора 4 присоединены к паре продольных контактов жидкостного маятникового переключателя 3, которые лежат в продольной плоскости прибора. Средняя точка управляющих обмоток статора 4 через балластное сопротивление 15 присоединена к фазе А.
Гиромотор со своим корпусом 2, жидкостный маятниковый переключатель 3, статор продольного коррекционного мотора 4 составляют гироузел, который подвешен на подшипниках в карданной раме 36. Гироузел может проворачиваться вокруг своей оси III—III относительно карданной рамы на углы ±26÷28º. Эти углы ограничены специальным упором.
Связь электроцепей гироузла и карданной рамы 36 осуществляется с помощью узла гибких токоподводов 31, расположенного на оси II—II гироузла и карданной раме 36.
Узел гибких токоподводов 31 состоит из двух панелей с контактами, одна из которых расположена на оси гироузла, другая на фланце карданной рамы. К контактам панелей припаяны ленточные S-образные токоподводы, позволяющие с карданной рамы подать питание на гиромотор 1, жидкостный маятниковый переключатель 3, обмотку возбуждения продольного коррекционного мотора 4, а также осуществить вывод сигналов с пары поперечных контактов жидкостного маятникового переключателя, лежащих в поперечной плоскости прибора.

Рис. 7. Электрокинематическая схема АГИ-1 (2-й серии).
1—гиромотор ГМ-4У, 2—корпус гиромотора, 3—жидкостный маятниковый переключатель, 4—статор продольного коррекционного мотора, 5—редуктор мотора отработки следящей рамы, 6—мотор отработки ДИД-0,5, 7—искрогасительные сопротивления (3300---3600 ом. 0,5 вт.), 8—выключатель поперечной коррекции, 9—шестиблочный коллектор следящей рамы, 10—узел щёток шестиблочного коллектора, 11—вилка штепсельного разъёма, 12—искрогасительное сопротивление (5100 ом. 0,5 вт.), 13—балластное сопротивление (100—350 ом. 2 вт.), 14—биметаллическое реле, 15—балластное сопротивление (270—910 ом. 1 вт.), 16—ротор продольного коррекционного мотора, 17—узел щёток четырёхблочного коллектора, 18—четырёхблочный коллектор карданного узла, 19—пусковая кнопка, 20—сферическая шкала, 21—фланец крепления шкалы, 22—стекло прибора, 23—включатель мотора отработки следящей рамы, 24—контакты включателя, 25—силуэт самолётика, 26—торцевой кулачок следящей рамы, 27—кулисный механизм, 28—ручка перемещения силуэта самолётика, 29—корпус прибора, 30—следящая рама, 31—узел гибких токоподводов, 32—ротор поперечного коррекционного мотора, 33—коммутатор, 34—узел щёток коммутатора, 35—статор поперечного мотора, 36—карданная рама.
Эти поперечные контакты жидкостного маятникового переключателя связаны с управляющей обмоткой статора 35 второго силового элемента коррекционного устройства — поперечного коррекционного мотора. Статор 35 поперечного коррекционного мотора жёстко связан с карданной рамой 36. Статор 35 аналогичен по своей конструкции статору 4 продольного коррекционного мотора, но выполнен в меньших габаритах. Его обмотка возбуждения включена последовательно в фазу А.
На карданной раме 36 соосно со статором 4 укреплён ротор 16. Ротор 16 представляет собой пакет железа с короткозамкнутыми витками типа беличьей клетки. Беличья клетка выполнена литьём под давлением (из алюминиевого сплава). Пакет железа является арматурой в этой отливке. Статор 4 с ротором 16 составляют продольный коррекционный мотор.
Аналогично устроен ротор 32, укреплённый на следящей раме 30. Статор 35 с ротором 32 составляют поперечный коррекционный мотор. Как продольный, так и поперечный коррекционные моторы являются моторами асинхронного типа. Так же, как и у асинхронного гиромотора их работа основана на двух принципах:
а) на принципе вращающегося магнитного поля, создаваемого статором;
б) на законе Ленца, по которому магнитное поле, перемещающееся мимо замкнутого контура (короткозамкнутые витки типа беличьей клетки), индуктирует в этом контуре ток таким образом, что он противодействует причине, обусловившей возникновение.
Отличие работы коррекционных моторов от гиромотора заключается лишь в том, что в гиромоторе взаимодействие вращающегося поле статора и короткозамкнутых витков типа беличьей клетки ротора используется для вращения ротора. В коррекционных моторах это взаимодействие используется недля вращения ротора (ротор коррекционного мотора работает всегда в заторможенном режиме), а для получения момента, который накладывается на оси подвеса гиромотора с целью приведения его главной оси к вертикальному положению.
Конструктивно гиромотор и коррекционные моторы различаются тем, что в гиромоторе ротор расположен снаружи, а статор — внутри. Это необходимо для получения максимального момента инерции (для данного объёма гиромотора). В коррекционных моторах расположение ротора выбирается по конструктивным соображениям. Ротор продольного мотора расположен снаружи статора, ротор поперечного мотора — внутри статора (на рис. 7 ротор поперечного мотора для наглядности схемы условно показан также с наружи статора ). Кроме того, имеется различие в расположении обмоток статоров. В статоре гиромотора обмотки расположены геометрически под углом 120º и токи, протекающие по ним, сдвинуты по фазе также на 120º.
В статорах коррекционных моторов (в данной схеме) обмотки возбуждения и управления геометрически сдвинуты на угол 90º. На такой же сдвинуты по фазе и токи, протекающие по ним.
Карданная рама 36 с гироузлом, ротором 16 и статором 35 образуют карданный узел. Карданный узел может неограниченно поворачиваться вокруг своей оси II—II относительно следящей рамы 30.
Связь электроцепей карданного узла и следящей рамы осуществляется при помощи коллектора 18, расположенного на оси II—II, и узла щёток 17, укреплённого на следящей раме 30. Коллектор 18 состоит из четырёх токопроводящих колец. С каждым кольцом контактирует пара щёток.
С помощью коллектора 18 со следящей рамы 30 на карданный узел подаётся трёхфазный переменный ток напряжением 36 в с частотой 400 гц, а также выводится линия от средней точки управляющей обмотки статора 35 поперечного коррекционного мотора. Карданный узел, подвешенный на подшипниках в следящей раме, а также ротор 32 поперечного коррекционного мотора составляет трёхстепенный гироскоп с маятниковой коррекцией. Гиромотор гироскопа имеет возможность поворота относительно трёх взаимно перпендикулярно осей: оси о (главная ось вращения гироскопа, перпендикулярная полости чертежа), оси III—III и оси II—II. Главная ось вращения гироскопа расположена вертикально.
Коррекционная система
Коррекционное устройство в приборе АГИ-1 (2-й серии) — электрического типа. Этот тип коррекции позволяет легко выключать её при виражах, когда, кроме ускорения силы тяжести, действует центростремительное ускорение. При этом пузырёк жидкостного маятникового переключателя устанавливается по направлению равнодействующей этих ускорений (по направлению «кажущейся вертикали»).

Рис. 9 Кинематическая схема авиагоризонтов АГИ-1 (2-й серии)
1—гиромотор ГМУ-4У, 4—продольный коррекционный мотор, 6—мотор отработки ДИД 0,5, 8—выключатель поперечной коррекции, 19—пусковая кнопка, 20—сферическая шкала, 23—включатель мотора обработки следящей рамы, 25—силуэт самолётика, 26—торцевой кулачок следящей рамы, 27—кулисный механизм, 30—следящая рама, 35—поперечный коррекционный мотор, 36—карданная рама, 37—шкала поперечных кренов, 38—опорные подшипники следящей рамы, 39—указатель скольжения.
Если поперечную коррекцию при этом не выключить, она будет уводить ось гироскопа с вертикального направления к направлению «кажущейся вертикали».
Кроме того, электрическая коррекция позволяет использовать наиболее надёжные из существующих силовых элементов — асинхронные коррекционные моторы 35 (рис. 9). Они выполняют свою функцию — накладывание коррекционных моментов на гироузел и карданный узел — без движения с трением.
Благодаря этому исключается возможность механических затираний корректоров при загрязнении, при температурных перепадах и т. п.. Асинхронные моторы обладают, кроме того, высокой виброустойчивостью. Величина моментов коррекционных моторов находится в прямой зависимости от величин вредных моментов, вызываемых трением подшипников на осях прецессии карданного подвеса и дисбалансом рамок гироскопа. Чем больше величина возмущающих (вредных) моментов, тем больше следует повышать момент коррекционных моторов, т. е. увеличивать скорость прецессии. Скорость прецессии, вызываемая моментом коррекционных моторов, должна быть больше скорости прецессии, вызываемой возмущающими моментами на осях прецессии карданного подвеса.
Однако увеличение скорости прецессии увеличивает ошибки гировертикали при действии ускорений. Наибольший увод гироскопа получается при виражах. При действии переносных ускорения маятник устанавливается по кажущейся вертикали и поэтому любое коррекционное устройство уводит гироскоп при движении самолёта с ускорением. Какое бы ускорение не придавалось, гироскоп будет приходить к «кажущейся вертикали» со скоростью прецессии. Чем меньше она, тем меньше за один и тот же промежуток времени уйдёт гироскоп.
Для выбора возможно малой скорости прецессии устанавливают минимальное трение в осях прецессии.
В практике скорость прецессии гировертикали под действием коррекции выбирается равной 2—6 град/мин..
1. работа маятниковой коррекции.
Когда ось ротора гиромотора расположена вертикально, жидкостный маятниковый переключатель 3 (см. рис. 7), расположенный на корпусе гиромотора 2, горизонтален. Пузырёк воздуха занимает среднее положение между четырьмя контактами, поровну перекрывая их. Проводимость всех четырёх контактов будет одинакова. В этом случае в каждой управляющей обмотке, например, статора 4 продольного коррекционного мотора будут протекать одинаковые токи, но направленные в разные стороны. Статор 4 будет создавать два вращающихся во взаимно противоположных направления магнитных поля одинаковой напряжённости. Эти поля пересекая короткозамкнутые витки типа беличьей клетки ротора 16 продольного коррекционного мотора, вызовут два равных и взаимно противоположных момента.
Общий момент продольного коррекционного мотора будет равен нулю. На карданную ось III—III, на которой расположен продольный коррекционный мотор, не будет накладываться коррекционный момент (так же, как и на ось II—II, на которой расположен поперечный коррекционный мотор, так как коррекционный момент поперечного мотора в этом случае также равен нулю).
Если ось ротора отклонится от вертикали, относительно оси II—II, то жидкостный маятниковый переключатель выйдет горизонтального положения и пузырёк сместится.
Один из продольных контактов полностью покроется жидкостью, а второй окажется покрытым пузырьком воздуха. Проводимости контактов этой пары станут не одинаковыми; по управляющим обмоткам статора 4 продольного коррекционного мотора потекут резко различные токи: по обмотке, которая соединена с контактом, покрытым жидкостью, — большой ток по второй управляющей обмотке, которая соединена с контактом, покрытым пузырьком, — меленький ток.
Благодаря этому продольный коррекционный мотор наложит на ось III—III момент, который в свою очередь вызовет прецессию оси гироскопа вокруг оси II—II по направлению к вертикали. Как только ось ротора займёт вертикальное положение, действие коррекции прекратится. Аналогично работает поперечная коррекция авиагоризонта.
В зависимости от направления отклонения оси гиромотора от вертикали продольный и поперечный коррекционные моторы работают раздельно или одновременно. Последовательное включение обмоток возбуждения моторов в фазы гиромотора обеспечивает их форсированный режим работы при пуске прибора, так ка по ним во время разгона гиромотора протекают его пусковые токи. Вследствие этого сокращается время прихода гироскопа в рабочее положение после включения питания.
Продольный коррекционный мотор в процессе работа прибора всегда остаётся включённым (продольная коррекция в приборе не выключается).
Балластное сопротивление 15, включённая в цепь управляющей обмотки статора продольного мотора, ограничивает скорость прецессии гироскопа в продольной плоскости прибора в пределах от 2,6 до 4,4 град/мин..
2. Выключение поперечной коррекции во время разворотов и виражей.
Во время разворотов и виражей, как указано выше, коррекционные свойства поперечной коррекции нарушаются. Более того, коррекционные моторы, получая неправильную команду от жидкостного переключателя, уводят ось гироскопа с вертикального положения, создавая так называемые послевиражные ошибки. Для уменьшения их в приборе автоматически выключается поперечный коррекционный мотор во время разворотов и виражей.
В ы к л ю ч е н и е п о п е р е ч н о й к о р р е к ц и и в а в и а г о р и з о н т е АГИ-1 (2-й серии)
Поперечный мотор выключается благодаря тому, что средняя точка его управляющей обмотки присоединена не непосредственно к фазе Б, а через выключатель коррекции 8, жёстко связанный с осью вращения следящей рамы 30.
Выключатель коррекции состоит из двух колец 1 и 2 (рис. 10). Кольцо 1 состоит из двух рабочих секторов 1а и 1б и двух холостых секторов 1в и 1 г. Рабочие секторы 1а и 1б электрически соединены с кольцом 2. Угол секторов 1а и 1б составляет 18º (±9º).
С кольцом 1 контактируют щётки 3 и 4, закреплённые на корпусе прибора; с кольцом 2 контактирует щётка 5, также закреплённая на корпусе.
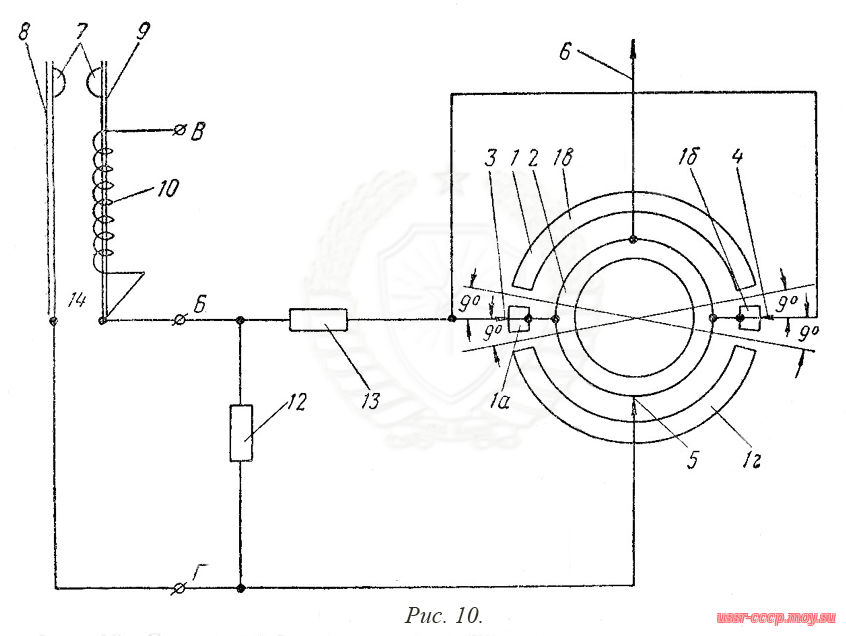
Рис. 10. Схема выключения поперечной коррекции на виражах в авиагоризонте АГИ-1 (2-й серии).
1—контактное кольцо, 1а и 1б—рабочие секторы, 1в и 1г—холостые секторы, 2—контактное кольцо, 3, 4 и 5—контактные щётки, 6—отвод на среднюю точку управляющих обмоток поперечного коррекционного мотора. 7—контакты биметаллического реле, 8 и 9—биметаллические пластины, 10—нагревательный элемент, 12— искрогасительное сопротивление (5100 ом, 0,5 вт), 13—балластное сопротивление (270—350 ом, 2 вт), 14—-биметаллическое реле.
Отвод 6 связывает рабочие секторы кольца 1 и кольцо 2 со средней точкой управляющих обмоток поперечного коррекционного мотора.
При горизонтальном полёте щётки 3 и 4 находятся на рабочих секторах 1а и 1б, фаза Б подаётся на среднюю точку управляющих обмоток поперечного коррекционного мотора и последний корректирует гироскоп.
При вираже с креном более 13º щётки 3 и 4 сходят с рабочих секторов 1а и 1б, так как следящая рама с выключателем коррекции остаётся в горизонтальной плоскости, а щётки 3 и 4, будучи связанными с корпусом прибора (а следовательно, с самолётом), обмоток прерывания и коррекции выключается.
Во время пуска прибора происходят колебания следящей рамы и щёток 3 и 4 могут сходить с рабочих секторов 1а и 1б выключателя коррекции.
Если при пусковом режиме не блокировать цепь выключателя коррекции, то не будет гарантировано восстановление оси гиромотора к вертикальному положению из-за возможного выключения поперечного коррекционного мотора. Такая блокировка осуществляется при помощи биметаллического реле 14 с выдержкой времени.
Когда питание на прибор не включено, контакты 7 биметаллического реле замкнуты и поэтому закорачивают клеммы Б и Г штепсельного разъёма прибора. При этом фаза Б подаётся на среднюю точку управляющих обмоток поперечного коррекционного мотора не только через выключатель коррекции, но и через щётку 5. Контакты 7 реле остаются замкнутыми и после включения питания на прибор в течении времени выдержки реле (40—150 сек.).
По истечении этого времени контакты 7 реле размыкаются и схема переходит с пускового режима на рабочий, во время которого питание поперечного коррекционного мотора производится только через выключатель коррекции. Колебательный режим следящей рамы кончается через 5—20 сек. после включения на прибор питания, однако время выдержки реле установлено от 40 до 150 сек., что необходимо для обеспечения надёжности выполнения пускового режима в требуемом диапазоне температур от +50 до -45ºС.
Биметаллическое реле 14 состоит из двух биметаллических пластин 8 и 9, имеющих на своих концах контакты 7. На одной из пластин расположен нагревательный элемент 10 — катушка из манганинового провода. Время выдержки реле достигается за счёт того, что устанавливают определённое нажатие контактов 7 (примерно 25—30 Г). При включения питания на прибор катушка 10, расположена на биметаллической пластины 9, начинает нагревать её и этим самым заставляет её деформироваться. По мере деформации биметаллической пластины 9 от нагревания нажатие контакта 7 постепенно ослабевает и через 40—50 сек. после включения питания контакты 7 разрываются.
В рабочем движении прибора между контактами 7 образуется зазор 0,4—0,8 мм.. Наличие двух металлических пластин позволяет обеспечить указанную выдержку времени на всём требуемом диапазоне температур (от +50 до -45ºС). При изменении температуры обе пластины одновременно изгибаются, оставаясь параллельно друг другу. Поэтому нажатие контактов, а следовательно, и время выдержки изменяются в допустимых пределах.
Для уменьшения искрообразования между щётками и рабочими ламелями выключателя коррекции, которое происходит при выключении и включении поперечной коррекции, служит искрогасительное сопротивление 12 (5100 ом; 0,5 вт.).
Балластное сопротивление 13 (270—350 ом; 2 вт.), включённое в цепь управляющей обмотки поперечного коррекционного мотора, ограничивает скорость прецессии в поперечной плоскости прибора от 4 до 10 град/мин..
Клемма Г на штепсельном разъёме прибора служит для проверки времени блокировки выключателя коррекции, а также для проверки угла крена, при котором выключается коррекция. Для этого между клеммами Г и Б включается вольтметр переменного тока. После включения питания в течении пускового режима работы прибора вольтметр будет показывать 0 (пока клеммы Г и Б закорочены биметаллическим реле).
С того момента, когда срабатывает биметаллическое реле (разомкнутся его контакты), вольтметр будет показывать падение напряжения на балластном сопротивлении 13 (2—18 в.). Так проверяется время срабатывания биметаллического реле.
Если при рабочем режиме прибора (когда биметаллическое реле разомкнуто) плавно наклонять корпус прибора влево или вправо, то в момент выключения поперечной коррекции, когда щётки 3 и 4 сойдут рабочих ламелей 1а и 1б, вольтметр покажет 32—36 в., т. е. линейное напряжение между фазами В и Б. Так проверяется угол крена, при котором, при котором выключается коррекция.
Следящая система
Как было указано в подразделе «Принципиальные и конструктивные особенности приборов», следящая система, применённая в приборах, позволяет постоянно сохранять максимальную устойчивость гироскопа независимо от положения самолёта по углам крена и тангажа.
Следящая система приборов АГИ-1 (2-й серии) состоит из:
1) следящей рамы 30 (см. рис. 7), в которой подвешен на подшипниках узел кардана. Следящая рама 30 подвешена в корпусе прибора. Передняя её часть опирается на три подшипника, расположенные под углом 120º, задняя часть — на один подшипник;
2) привода, состоящего из мотора 6 (ДИД-0,5) и редуктора 5, имеющего передаточное отношение 1 : 303. Привод обеспечивает скорость отработки следящей рамы не ниже 180 град/сек;
3) включателя 23 мотора следящей рамы, укреплённого на карданной раме 36, и контактов 24 включателя, жёстко связанных с гироузлом.
При отключении оси II—II от перпендикулярного положения к главной оси гироскопа (ось о) на 1—2 включатель мотора заставляет мотор 6 так отрабатывать следящую раму, чтобы ось II—II была перпендикулярна оси о (положение максимальной устойчивости гироскопа).
Для уменьшения искрообразования между ламелями включателя 23 мотора и контактами 24 параллельно элементам включателя введены два искрогасительных сопротивления 7 (3000—3600 ом; 0,5 вт.);
4) коммутатора 33, укреплённого на оси II—II карданного узла, и узла щёток 34, связанного со следящей рамой 30.
Коммутатор переключает фазы мотора 6 в том случае, когда угол тангажа становится больше 90º (петля или полупетля Нестерова и т. п.), обеспечивая правильное направление обработки мотора при положении самолёта вверх колёсами.
Правильным направлением отработки мотора является такое, которое противоположно рассогласованию. Например, если угол между осью II—II и главной осью о стал 92º (рассогласование +2º), то при правильной (согласованной) отработке мотор 6 будет проворачивать следящую раму в сторону уменьшения этого угла до 90º; после установления этого угла мотор остановится. Если наоборот, этот угол станет равным 88º, мотор будет проворачивать следящую раму в сторону увеличения этого угла до 90º, после чего так же остановится.
При отсутствии в схеме коммутатора правильное направление отработки будет обеспечивается только при углах тангажа, меньших 90º. В том случае, когда самолёт повернётся вверх колёсами (углы тангажа больше 90º), направление станет неправильным — оно будет одного направления с рассогласованием, и следящая система не будет поддерживать перпендикулярность осей II—II и о и потеряет свой смысл.
Наличие в схеме коммутатора обеспечивает правильную отработку следящей системы при любом пространственном положении самолёта.
Питание на неподвижную часть гиросистемы подаётся при помощи коллектора 9 следящей рамы и узла щёток 10, закреплённого на корпусе прибора.
Указывающая система
Показания крена и тангажа самолёта измеряются при помощи сферической шкалы 20, укреплённой фланцами 21 на оси гироузла, силуэта самолётика 25 и шкалы кренов 37 (см. рис. 7, 8 и 9), связанных с корпусом прибора. Сферическая шкала имеет цветную окраску: верхнее полушарие с надписью «Спуск» окрашено в коричневый цвет, нижнее — с надписью «Подъём» — в голубой. При пикировании силуэт самолётика находит на коричневую. полусферу шкалы (самолёт летит к земле), при кабрировании — на голубую (самолёт летит в небо).
Шкала тангажа по всей сфере от 0 до 360º градуирована через 10º, углы 20, 40, и 60º — оцифрованы. Шкала кренов, расположенная на фланце корпуса, градуирована через 15º, деление 30 и 60º — оцифрованы.
Поскольку угол атаки самолёта при полёте по прямой зависит от скорости и высоты, в приборе предусмотрена ручка 28, расположенная с левой стороны передней части прибора, которая при помощи кулисного механизма 27 даёт возможность лётчику при длительном полёте по прямой совмещать силуэт самолётика 25 с индексом-горизонтом сферической шкалы 20.
Более подробно об определении углов крена и тангажа смотри в разд. III «Система показаний авиагоризонтов АГИ-1 (2-й серии).
Для определения наличия направления бокового скольжения самолётика на фланце прибора под шкалой кренов расположен указатель скольжения 39.
Все элементы указывающей системе на приборе закрыты стеклом 22, которое во избежание запотевания с внутренней стороны покрыто целлофаном.
Пусковая система
К авиагоризонтам, устанавливаемым на самолёты, предъявляются высокие требования к времени готовности — времени, в течение которого индекс-горизонт сферической шкалы совместится с силуэтом самолётика, а гиромотор наберёт полные обороты.
В описываемых авиа горизонтах применён более мощный гиромотор, время разгона которого в 2—2,5 раза меньше, чем у гиромотора авиагоризонта АГК-47Б.
Для того чтобы обеспечить быстрое приведение оси гиромотора к вертикальному положению (совмещение индекса-горизонта с силуэтом самолётика), в схеме прибора предусмотрено:
1. Включение обмоток возбуждения продольного и поперечного коррекционных моторов последовательно в фазы питания гиромотора. При таком включении по обмоткам возбуждения во время пускового режима протекают пусковые токи гиромотора, что увеличивает момент коррекционных моторов в 2—3 раза и ускоряет восстановление оси гиромотора к вертикальному положению. Когда гиромотор достигнет рабочего числа оборотов, токи в фазах и моменты коррекционных моторов уменьшается до своих рабочих величин.
2. Балансировка гироузла с нижней маятниковой коррекцией относительно оси, который не позволяет к нему при нерабочем положении прибора отклоняться на большие углы от рабочего (вертикального) положения. Это уменьшает время восстановления оси гиромотора к вертикали.
3. Специальный пусковой маятник, расположенный на карданной раме (описание устройства пускового маятника см. в разделе «Конструкция АГИ-1 (2-й серии).
Этот маятник при нерабочем положении прибора не даёт переворачиваться узлу кардана и поддерживает его около рабочего положения в секторе ±45º, что также позволяет сокращать пусковой период прибора, особенно в условиях холода.
4. Пусковая кнопка 19, расположенная с правой стороны передней части прибора. Она состоит из кнопки, коленчатой оси, подшипника и возвратной пружины.
Возвратная пружина держит весь узел пусковой кнопки в отведённом положении, при котором подшипник кнопки не касается торцевого кулачка 26 следящей рамы.
При нажатие кнопки коленчатая ось с подшипником подаётся вперёд, подшипник давит на торцевой кулачок 26 следящей рамы и ставит её в горизонтальное положение, которое наиболее выгодно сточки зрения сокращения времени пуска прибора.
5. В приборе АГИ-1 (2-й серии) предусмотрено биметаллическое реле 14 (см. рис. 7), наличие которого в схеме при пуске прибора обеспечивает питание поперечного коррекционного мотора, помимо выключателя коррекции, т. е. независимо от наклона следящей раме относительно корпуса прибора.
Питание прибора
Для подключения питания служит штепсельный разъём 11 с четырьмя клеммами. Клемма А присоединяется к клемме 3 преобразователя ПАГ-1Ф (или ПАГ-1ФП); клемма Б — к клемме 4 преобразователя; клемма В — к клемме 5.
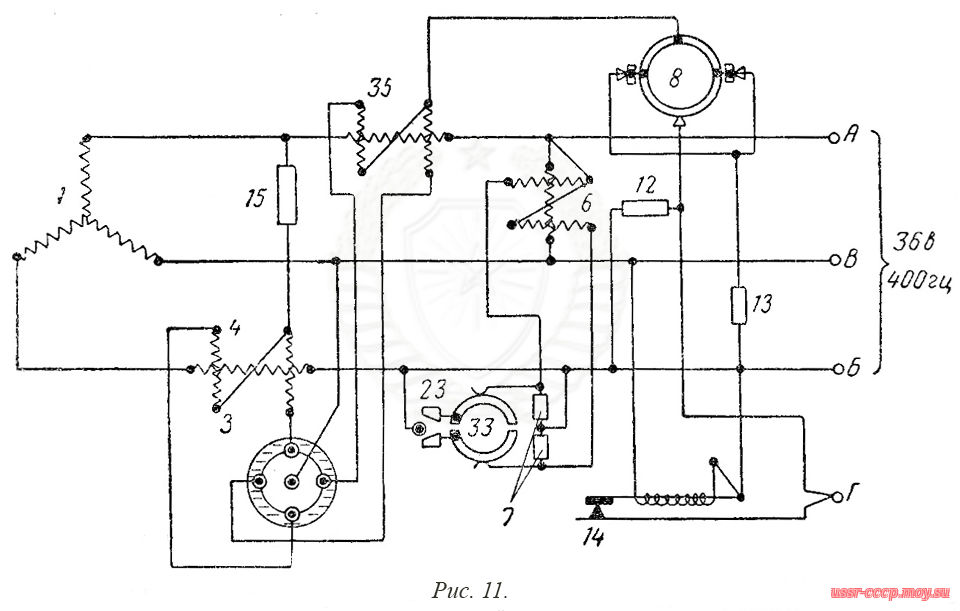
Рис. 11. Принципиальная электрическая схема АГИ-1 (2-й серии).
1—статор гиромотора ГМ-4У, 3—жидкостный маятниковый переключатель, 4—статор продольного коррекционного мотора, 6—статор мотора отработки ДИД-0,5, 7—искрогасительное сопротивление (3000—3600 ом; 0,5 вт), 8—выключатель поперечной коррекции, 12—искрогасительное сопротивление (5100 ом; 0,5 вт), 13—балластное сопротивление (100—350 ом; 2 вт), 14—биметаллическое реле, 15—балластное сопротивление (270—910 ом; 1 вт), 23—включатель мотора отработки следящей рамы, 33—коммутатор, 35—статор поперечного коррекционного мотора.
Клемма Г в приборе АГИ-1 (2-й серии) служит для проверки прибора и при эксплуатации прибора остаётся свободной (неподключенной).
На (рис. 11) показана принципиальная электрическая схема приборов АГИ-1 (2-й серии).
V. Конструкция АГИ-1 (2-й серии)
Основные узлы
Гиромотор (рис. 13)
Гиромотором авиагоризонта является трёхфазный асинхронный двигатель с одной парой полюсов типа ГМ-4У. Статор 1 с обмоткой и втулками 2 и 5 жёстко укреплён на оси 6.

Рис. 13. Гиромотор
1—статор, 2 и 5—втулки подшипников, 3 и 7—крышки ротора, 4—пружинная шайба, 6—ось, 8—резьбовая гайка, 9—ротор гиромотора, 10—обод ротора.
[01] [02] [03] [04] [05] [06]
Источник: https://ussr-cccp.moy.su/index/aviacija_sssr/0-10 |