








|
Каталог статей СССР
Путь-4МПА — Пилотажно-навигационная система
Основные технические данные 1. Инструментальная точность системы:
2. При пилотировании самолёта по командным стрелкам система автоматически ограничивает угол крена самолёта до 18,3±3°. 3. Угол подхода к оси ВПП в насыщенной зоне курсового маяка при раннем начале четвёртого разворота составляет 28,5±3°. 4. Погрешности показаний приборов при нормальных климатических условиях (t=25±10°С, Р=750±30 мм рт. ст. и относительной влажности 65±15%):
5. Время готовности к работе не более 1 мин. 6. Рабочий диапазон температур от +50 до -60°С. 7. Высотность до 25000 м. 8. Питание от источников:
9. Потребляемая мощность:
10. Вес комплекта не более 60 кг.
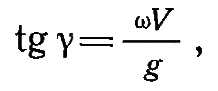
ПРИНЦИП ДЕЙСТВИЯ СИСТЕМЫ ПО БОКОВОМУ КАНАЛУ Параметры движения самолёта в горизонтальной плоскости. Рассмотрим взаимосвязь основных параметров движения самолёта в горизонтальной плоскости при заходе на посадку по системе СП-50М (ILS). Самолёт в горизонтальной плоскости при переходе с одной заданной траектории на другую, как и при стабилизации на ней, управляется с помощью координированных разворотов. При координированном развороте выполняется условие (высотность до 25000 м.):
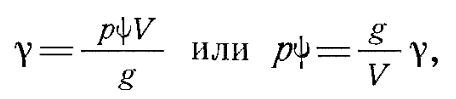
1а. которое устанавливает зависимость между линейной и угловой скоростью разворота и креном самолёта. При координированной развороте угловая скорость ω разворота самолёта равна скорости изменения курса ρψ. При малых кренах tg γ≈γ -, тогда
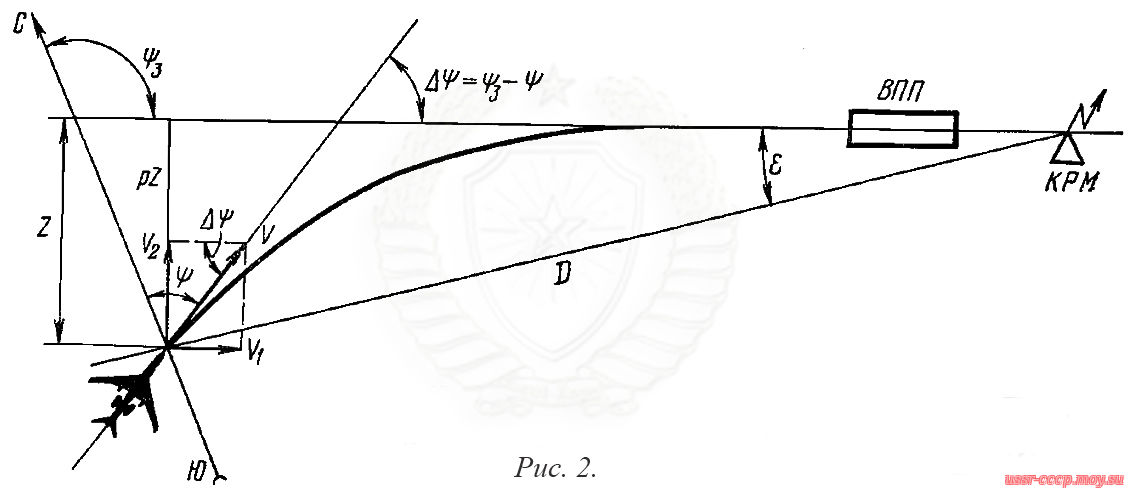
1. т. е. скорость изменения курса ρψ при координированном развороте всегда пропорциональна крену γ. Следовательно, наличия крена приводит к изменению курса самолёта, что в сою очередь, приводит к смещению центра масс в горизонтальной плоскости относительно заданной траектории. Положение самолёта в горизонтальной плоскости относительно траектории посадки (оси ВПП) определяется с помощью курсовой системы КС-6 (КС-8) и радионавигационной системы «Курс МП». Курсовая система изменяет курс самолёта ψ, который сравнивается с заданным в ручную курса оси ВПП ψз. В результате определяется отклонение ∆ψ продольной оси самолёта от оси ВПП (рис. 2). Аппаратура «Курс МП» определяет угловое отклонение ε центра масс самолёта от равносигнальной зоны (оси ВПП) относительно курсового маяка КРМ. Линейное отклонение Z самолёта от оси ВПП можно определить через угловое отклонение ε и дальность D до маяка: Z=D siu ε. 2а.
Рис. 2. Заход на посадку с помощью ПНС.
При малых углах sin ε≈ε. Тогда Z≈Dε. 2. Так как при выходе самолёта на ось ВПП дальность D изменяется мало, то можно допустить, что линейное отклонение Z пропорционально угловому ε. Производная линейного отклонения ρZ является скоростью приближения (удаления) самолёта к оси ВПП. Продифференцировав уравнение (2) для «Замороженной» дальности, получим ρZ≈Dρε. 3. Следовательно, производная углового отклонения ρε пропорциональна скорости приближения (удаления) самолёта к оси ВПП. В свою очередь, скорость приближения зависит от скорости самолёта V и углах ∆ψ (при скорости и=0). pZ=V2=V sin ∆ψ 3а. При малых углах sin ∆ψ≈∆ψ. Тогда pZ≈V ∆ψ 4. Приравняв правые части (3 и 4) и продифференцировав их, получим
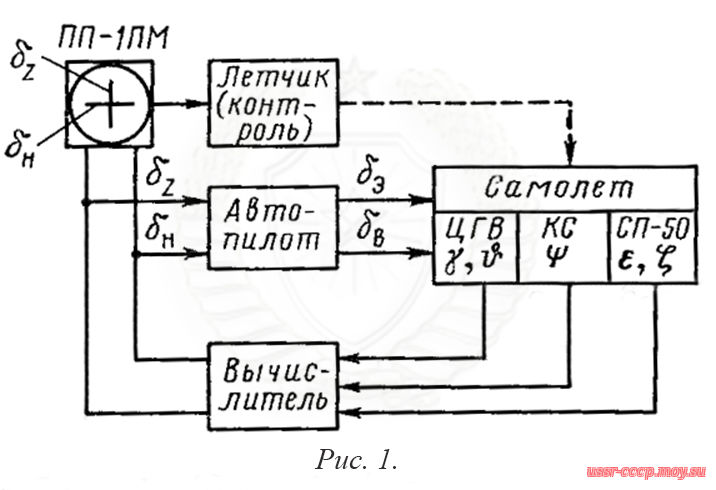
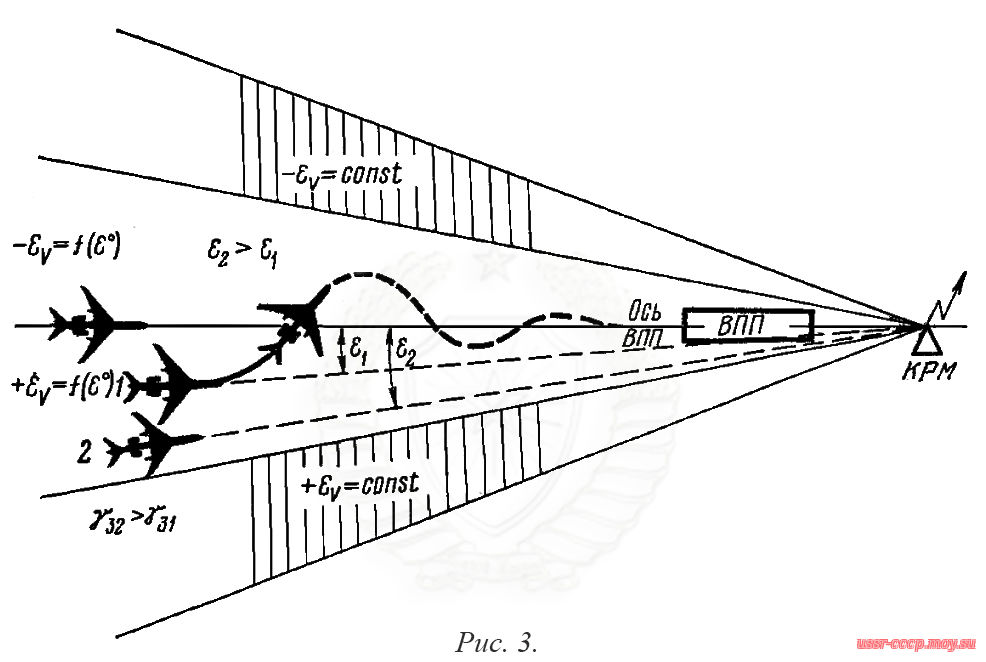
Принцип действия Для вывода самолёта по оптимальной траектории на ось ВПП и стабилизации его на сигналы, пропорциональные отклонения ∆ψ и ε, подаются в вычислитель В-12 системы «Путь-4МПА». В вычислителе В-12 из этих сигналов формируется сигнал заданного крена γз, т. е. того крена, который должен иметь самолёт исходя от отклонений ∆ψ и ε, чтобы с разворотом выводить на ось ВПП по оптимальной траектории. Вычислительный заданный крен γз сравнивается в усилителе У-20Н с истинным креном самолёта γ. Если истинный крен не равен заданному, то возникает команда по крену -δz=γ±γз, которая индицируется на пилотажном приборе ПП-1ПМ. Выполняя команду, лётчик задаёт самолёту крен, равный заданному γз. Командная стрелка прибора ПП-1ПМ устанавливается в нулевое положение, а самолёт движется по оптимальной траектории выхода на ось ВПП. По мере приближения к оси ВПП отклонение ∆ψ и ε уменьшаются, что приводит к уменьшению заданного крена γз. При этом истинный крен γ становиться больше заданного γз и возникает команда δz обратного знака, выполняя которую лётчик уменьшает крен самолёта. Так по мере приближения к оси ВПП самолёт выходит из крена. После выхода самолёта на ось ВПП с помощью команд происходит стабилизация центра масс самолёта на этой оси. Таким образом, в вычислителе В-12 системы «Путь-4МПА» в любом положении самолёта вычисляется оптимальная траектория выхода его ось ВПП. Оптимальная траектория вычисляется в виде заданного крена, и лётчику в каждый момент времени указывается, как надо управлять самолётом, чтобы его центр масс двигался по вычислительной траектории. Анализ закона управления Как отмечалось, сигнал команды по крену δz формируется путём сравнения сигналов заданного γз и истинного крена γ: δz=t(γ ± γз), 5. где t — коэффициент пропорциональности. Сигнал истинного крена γ снимается с ЦГВ-4. Сигнал заданного крена формируется в вычислителе В-12 путём алгебраического сложения сигналов ε, ρε, ∆ψ, ρψ с нужными порциями. Сигнал ε поступает с аппаратуры «Курс МП» и является основным сигналом, указавающим положение центра масс самолёта относительно заданной траектории (оси ВПП). Полярность его зависит от направления, а величина — от величины углового отклонения самолёта от оси ВПП (рис. 3).
Рис. 3. Движение самолёта при пропорциональном управлении
При плоскопараллельном уходе самолёта с оси ВПП для его возвращения на неё необходимо задать самолёту крен в сторону оси ВПП тем больший, чем больше отклонение ε. Следовательно, заданный крен γз должен быть пропорциональным отклонению самолёта от оси ВПП , т. е. γε=Rεε, Где Rε — коэффициент пропорциональности. если сигнал заданного крена γз будет формироваться только из сигнала ε, то будет осуществляться пропорциональное управление, которое имеет следующие недостатки: недостаточная жёсткость стабилизации самолёта на заданной траектории, так как команда возникает после значительного отклонения; выход самолёта на заданную траекторию всегда сопровождается затухающими колебаниями относительно неё. Для устранения этих недостатков при формировании заданного крена, кроме сигнала ε, используется его производная рε. В этом случае заданный крен γε=Rεε+Rрεрε, где Rрε — коэффициент пропорциональности (необходимая порция). Сигнал рε пропорционален скорости удаления (приближения) самолёта к оси ВПП и опережает основной сигнал ε. Сигнал рε возникает при перемещении самолёта в секторе курса КРМ. При выходе самолёта за сектор курса сигнал рε равен нулю. [01] [02] [03] [04] [05] [06] [07] Источник: https://ussr-cccp.moy.su/index/aviacija_sssr/0-10 Просмотров: 379
|
| |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||







 1
1