



|
Каталог статей СССР
Система регистрации режимов полёта МСРП-12-96(-1)-С2 — Библиотека СССР (стр. 86—97 из 112)
5. Тарируемые точки, получаемые при последующих тарировках датчиков по истечении года при температуре +20±10 °С, не отличаются от первоначальной кривой более чем на 3% от диапазона измерения скорости. 6. Температурный интервал от -60 до +60 °С. 7. Датчик ДАС выдерживает перегрузочное давление, соответствующее скорости 900 км/час в течение 1 мин. Датчик ДАС-2 выдерживает перегрузочное давление, соответствующее скорости 1200 км/час в течение 1 мин. 8. Питание — постоянный ток напряжением 6,3 В от блока питания БП-7.
10. Масса датчика не превышает 1,5 кг.
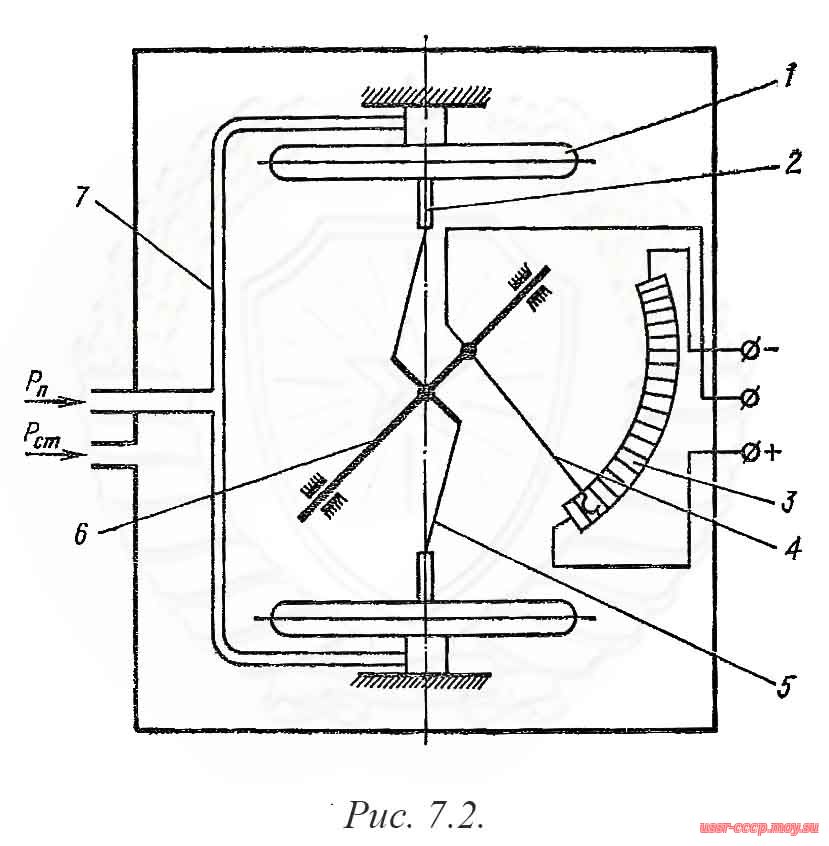
3. Принцип работы датчика Принцип работы датчика приборной скорости ДАС и ДАС-2 основан на измерении динамического давления (Рд) воздуха, соответствующего определенному значению приборной скорости, с последующим преобразованием последней в сигнал, выдаваемый в виде относительного сопротивления. По трубопроводу полное давление (Рп) поступает в чувствительные элементы. Статическое давление (Рст) поступает в герметический корпус датчика. Под действием разницы полного и статического давления (Рд=Рп-Рст) чувствительные элементы прогибаются и через тяги поворачивают ось, на которой закреплена щётка, скользящая по намотке потенциометра. Выходное относительное сопротивление потенциометра измеряется пропорционально изменению скорости.
4. Проверка работоспособности датчика (на летательном аппарате) Произвести проверку правильности подключения ДАС и ДАС-2 в барометрической системе самолёта: 1. Замерить относительное сопротивление датчиков ДАС и ДАС-2. Оно не должно быть более 10%. 2. С помощью установки КПУ-3 создать разрежение в линии статики барометрической системы не более 700 км час по индикаторной шкале установки КПУ-3.
89 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
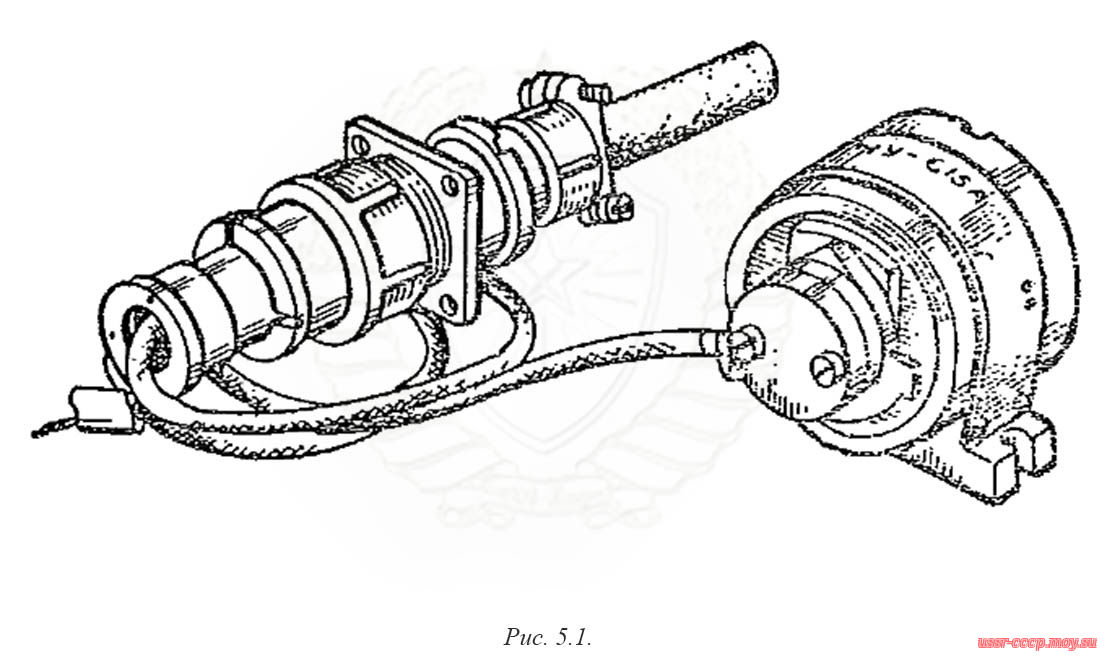
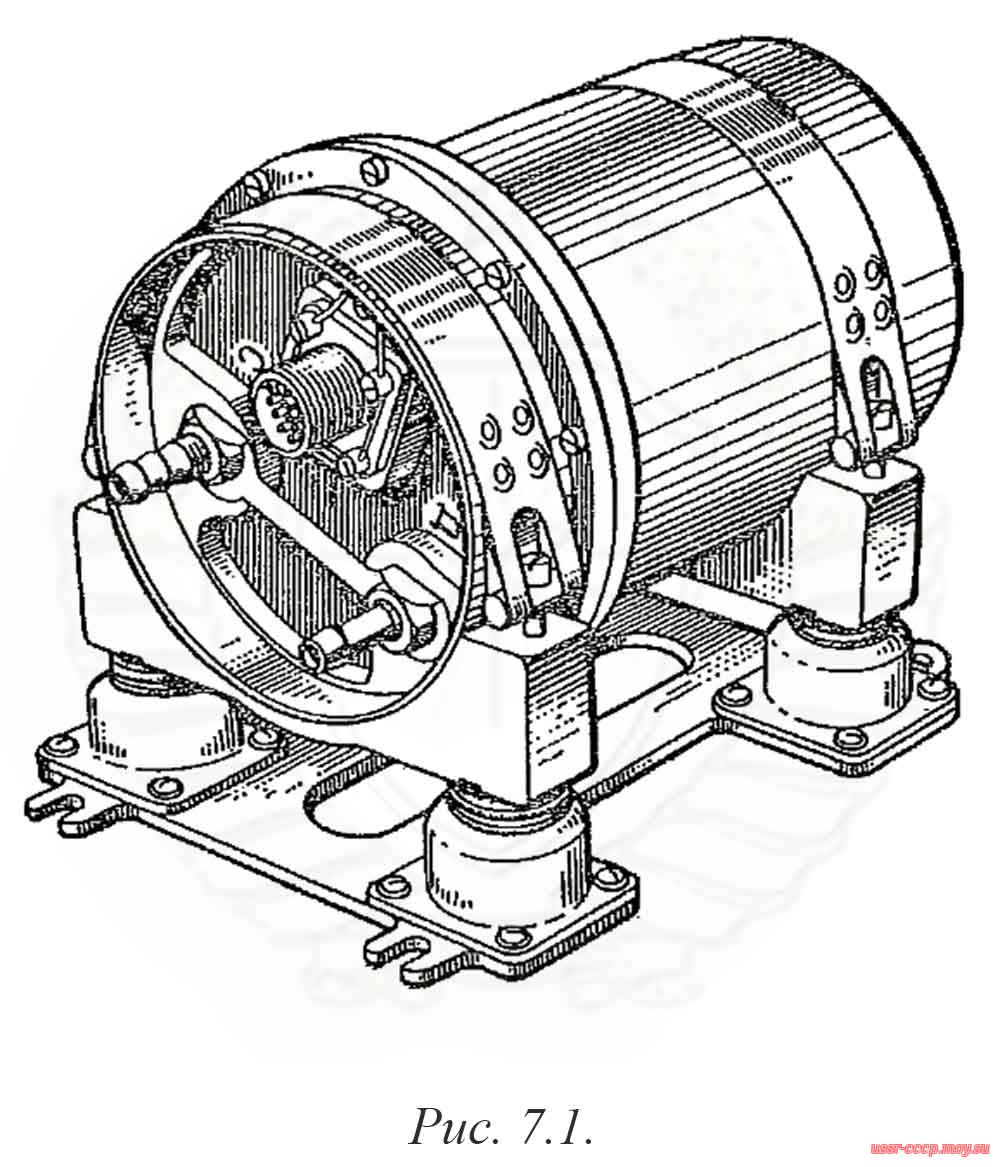
Рис. 7.1. Датчик приборной скорости ДАС (ДАС-2).
Рис. 7.2. Принципиальная схема датчика ДАС (ДАС-2). 1—чувствительный элемент; 2—центр; 3—потенциометр; 4—щётка; 5—тяга; 6—ось; 7—трубопровод.
90 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
3. Замерить относительное сопротивление датчиков ДАС и ДАС-2. Оно должно существенно увеличиваться по сравнению со значениями, замеренными по (п. 1) данного раздела. 4. Стравить разрежение линии статики. Отключить установку КПУ-3. 5. Подключить установку КПУ-3 к приёмнику полного давления ППД-1, создать в системе полного давления барометрической системы избыточное давление не более 700 км/час по индикаторной шкале установки КПУ-3. 6. Замерить относительное сопротивление датчиков ДАС и ДАС-2. Оно должно быть существенно больше сопротивления, замеренного по (п. 1) данного раздела. 7. Стравить избыточное давление в барометрической системе, отключить установку КП.
ПРИЛОЖЕНИЕ 8 КРАТКОЕ ОПИСАНИЕ ДАТЧИКОВ ДАВЛЕНИЯ ДМП-60, ДМП-100А 1. Назначение Малогабаритный потенциометрический датчик типа ДМП-А (рис. 8.1) предназначен для измерения избыточного давления нейтральных жидкостей, газов и выдачи напряжения, пропорционального давлению, в систему МСРП-12-96. П р и м е ч а н и е: Для защиты датчика типа ДМП-А от воздействия пульсаций давления в него встроен демпфер.
2. Основные технические данные
Температурный интервал — от -60 до +100°С. Погрешность при работе: при температуре от -60 до +60 °С —не более 3% от предела измерений;
Напряжение питания постоянного тока от блока питания БП-7 — 6,3 В.
3. Принцип работы датчика Избыточное давление воздействует на чувствительный элемент 6 датчика. В качестве чувствительного элемента применяется малогабаритная грибковая мембрана. Под действием избыточного давления мембрана деформируется. Деформация передаётся на шток 1, поворачивает ось 5 вместе с щёткодержателем 4 и перемещает скользящий контакт 3 по потенциометру А. При уменьшении давления возвратная пружина 2 заставляет ось следить за штоком. Каждому значению давления соответствует определенное положение скользящего контакта относительно потенциометра, а следовательно и выходное относительное сопротивление.
4. Подготовка датчика к работе после установки на летательном аппарате При подготовке датчика давления к работе — подсоединить вилку датчика к распределительному щитку системы МСРП-12-96; Проверить работоспособность датчика с помощью установки УП-МСРП, наблюдая на цифровом индикаторе поверочной установки
91 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
С Т Р А Н И Ц А Н Е Н А Й Д Е Н А Рис. 8.1. Рис. 8.2.
92 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
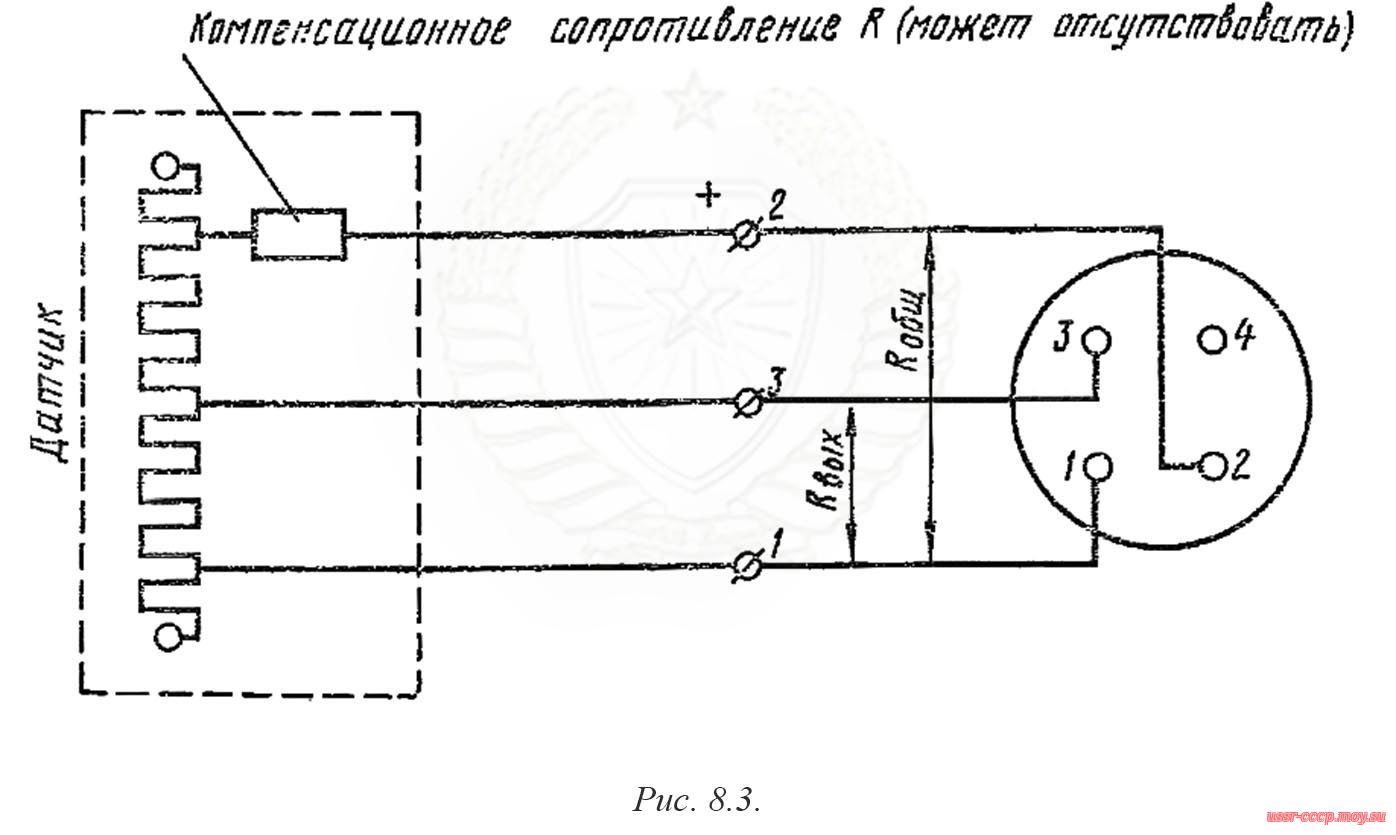
Рис. 8.3. Схема электрическая датчика ДМП-60А (ДМП-100А)
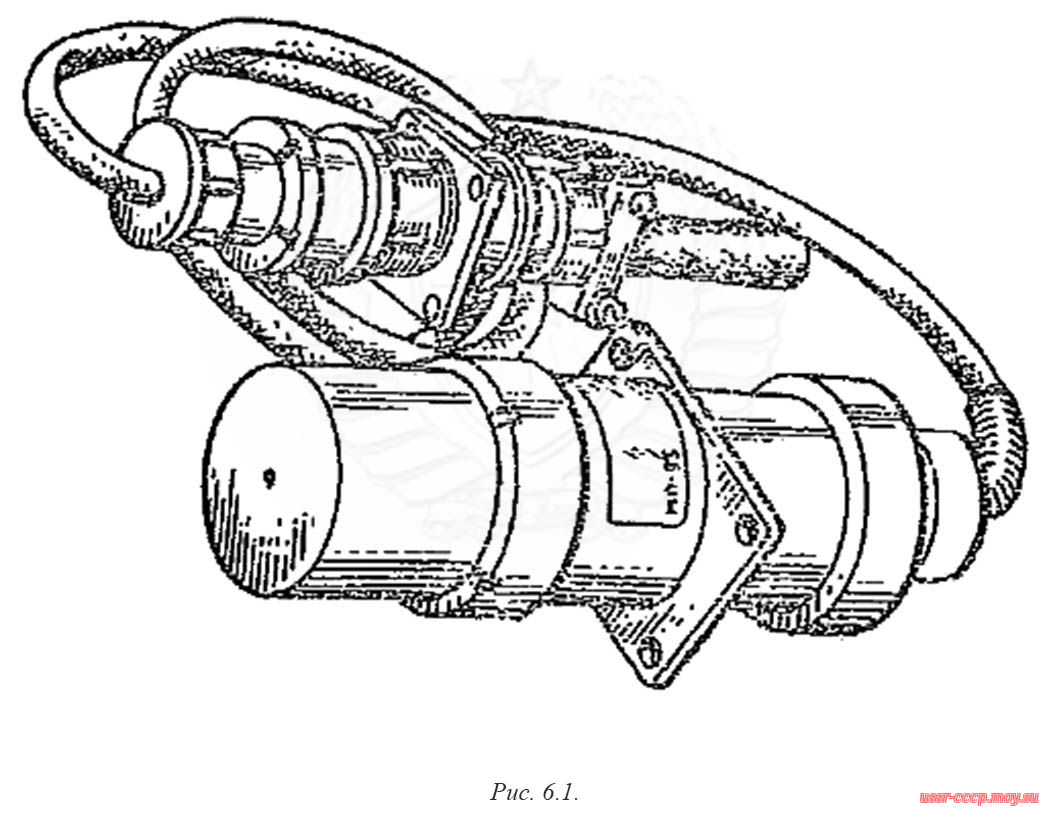
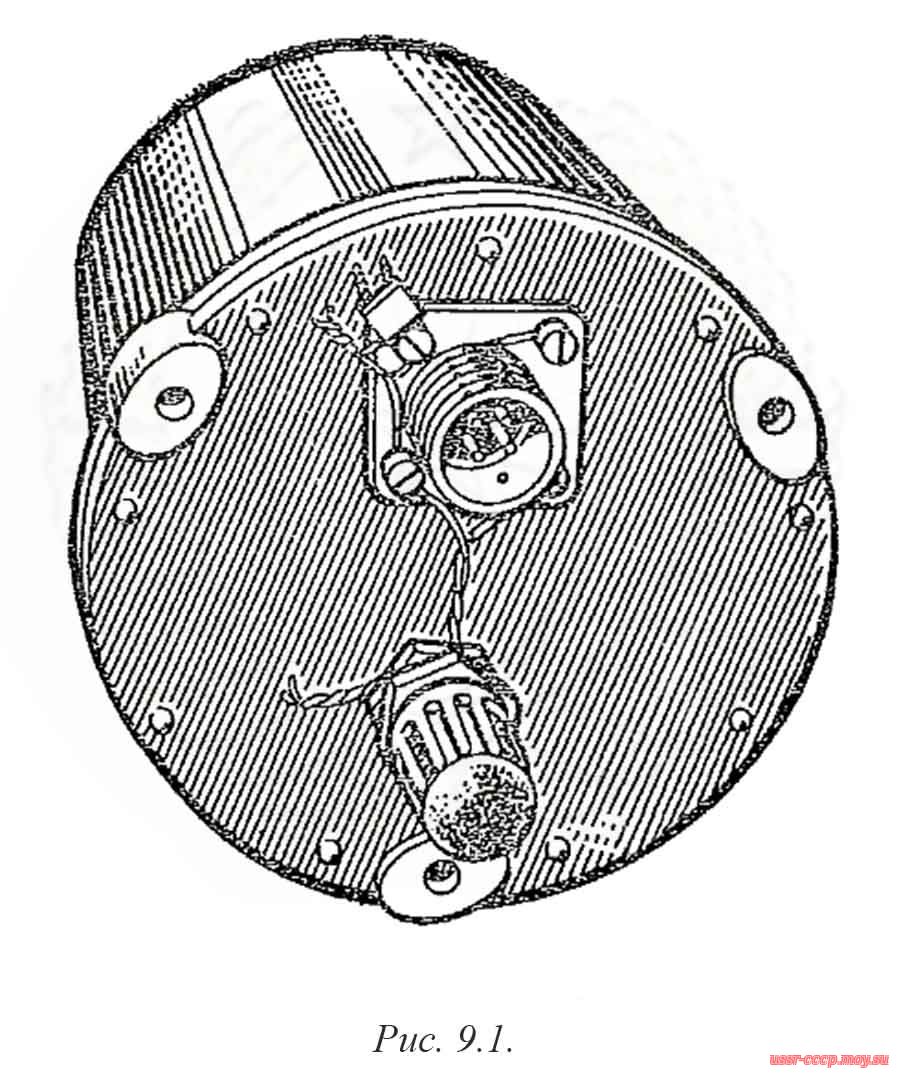
ПРИЛОЖЕНИЕ 9 КРАТКОЕ ОПИСАНИЕ ДАТЧИКОВ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ ДВбП 1. Назначение Потенциометрические датчики барометрической высоты ДВбП-13 и ДВбП-15 (рис. 9.1)
2. Основные технические данные Выходное сопротивление датчиков — 2000—1700 Ом. Напряжение питания постоянного тока от блока питания БП-7 — 6,3 В Диапазоны измерения барометрической высоты: для датчика ДВбП-13 — от 250 до 13000 м; Датчики имеют осредненную тарировочную таблицу, выражающую зависимость между измеряемой высотой полёта и выходным относительным сопротивлением при температуре +25±10°С на тарировочных точках: для датчика ДВбП-13 — 250; 0; 1000; 2000; 3000; 4000; 5000; 6000; 7000; 8000; 9000; 10000; 11000; 12000; 13000 м; Погрешность датчика (отклонение значений относительного сопротивления при повторных проверках в интервале температур внешней среды от -60 до +60°С от данных осредненной тарировочной таблицы) — не более ±3% выходного относительного сопротивления. Температурный интервал — от -60 до +60 °С. Сопротивление изоляции электрических цепей датчика относительно корпуса в нормальных климатических условиях — не менее 20 МОм. Масса датчика — не более 800 г.
93 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Рис. 9.1. Датчик барометрической высоты ДВбП-13 (ДВбП-15).
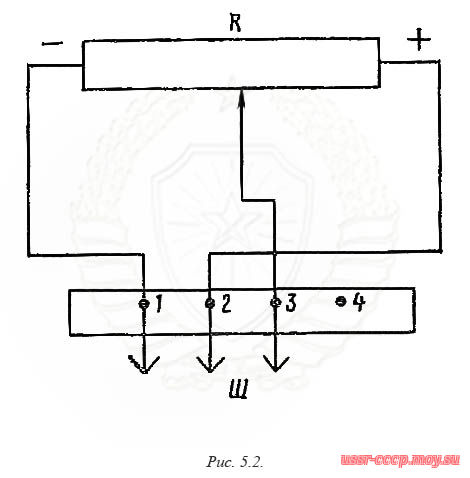
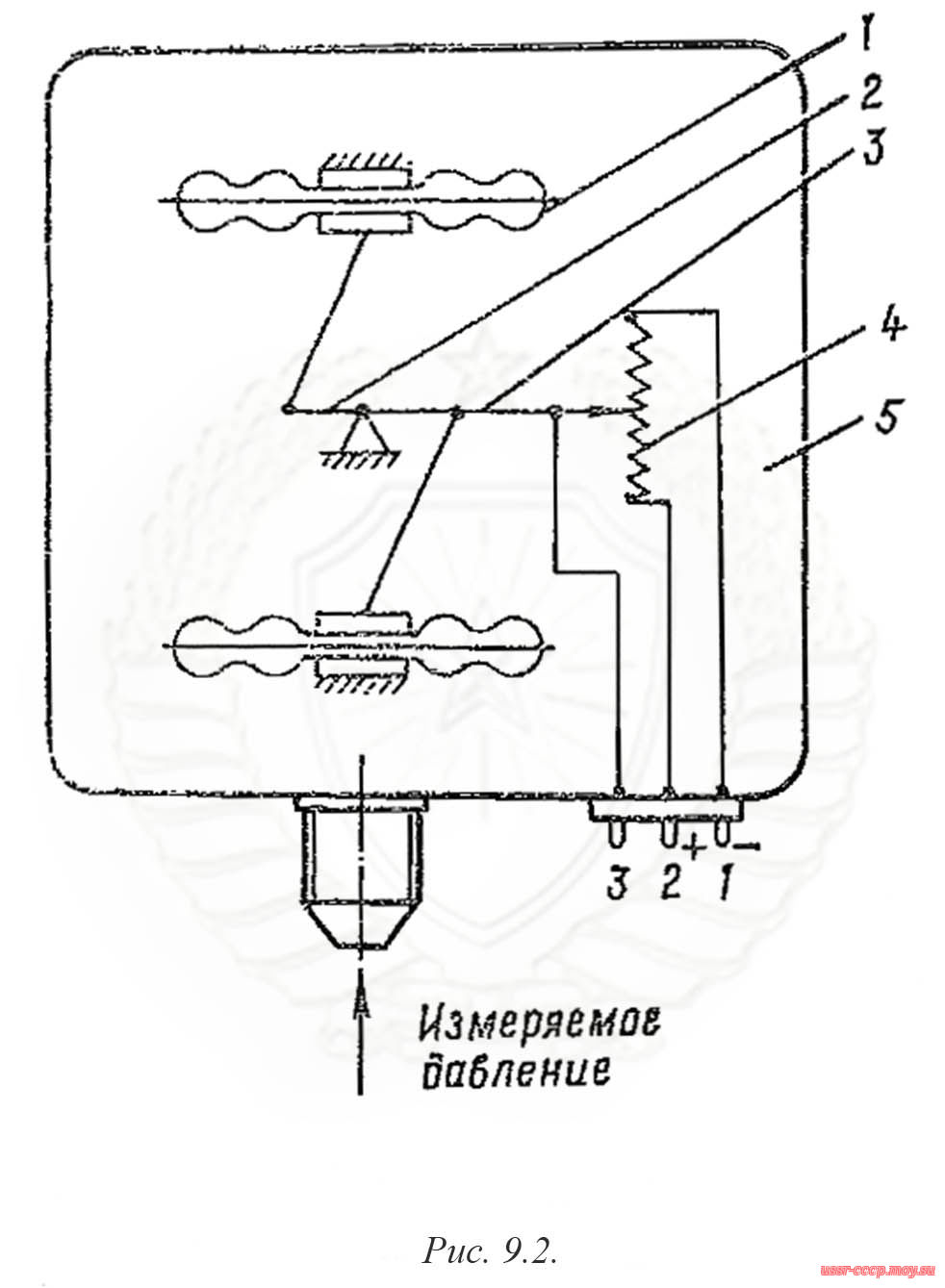
3. Принцип работы датчика В основу работы датчиков ДВбП-13 и ДВбП-15 положен барометрический метод измерения высоты. Принцип работы датчиков основан на функциональной зависимости между высотой и абсолютным давлением воздуха, которое уменьшается с увеличением высоты. Так как давление для одного и того же момента времени связано с высотой определенной зависимостью, то, зная эту зависимость и измерив на некоторой высоте абсолютное давление, можно определить и величину сигнала, выдаваемого датчиками на этой высоте. Для этого в качестве чувствительного элемента в датчиках используются анероидные коробки 1, расположенные внутри корпуса 5, сообщающегося с наружной атмосферой, вследствие чего давление в корпусе равно атмосферному на высоте полёта. При подъёме на высоту атмосферное давление падает, и анероидные коробки 1 под воздействием сил упругости мембран деформируются (две коробки применены для создания устойчивости при воздействии на датчик вибрационных и линейных перегрузок) и с помощью кривошипно-шатунного передаточного механизма 2 (состоящего из тяги, серьги и оси) перемещают щёткодержатель со щётками 3 по потенциометру 4. При этом каждому значению атмосферного давления соответствует определенное положение щётки 3. на потенциометре 4, а следовательно, и определенная величина выдаваемого датчиком выходного относительного сопротивления. При максимальной высоте полёта датчики выдают максимальное относительное сопротивление, но не более 98%. При минимальной высоте полёта датчики выдают относительное сопротивление от 3 до 10%. За относительное сопротивление принимается отношение сопротивления между клеммами 1 и З (рис. --) к сопротивлению между клеммами 1 и 2, выраженное в процентах.
4. Проверка работоспособности датчика на летательном аппарате 1. Произвести проверку правильности установки и подключения датчиков к барометрической системе самолёта. 2. Замерить относительное сопротивление датчиков. Это сопротивление должно быть не более 10%. 3. С помощью установки КПУ-3 создать разрежение в линии статики барометрической системы, но не более 700 км/час по индикаторной шкале установки КПУ-3. 4. Заменить относительное сопротивление датчиков. Оно должно существенно увеличиться по сравнению со значениями, замеренными в (п. 2) данного раздела. 5. Стравить разрежение в линии статики барометрической системы. Отключить установку КПУ-3.
94 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Рис. 9.2. Схема принципиальная датчика ДВбП-13 (ДВбП-15). 1—чувствительный элемент (анероидная коробка); 2—кривошатунный-шатунный механизм; 3—щётка; 4—потенциометр; 5—корпус.
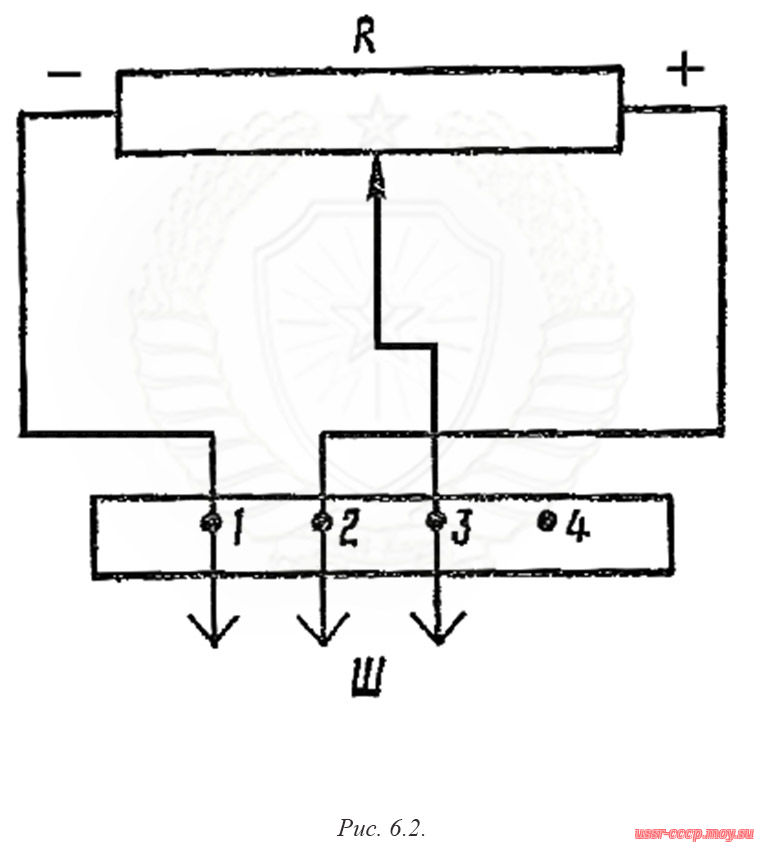
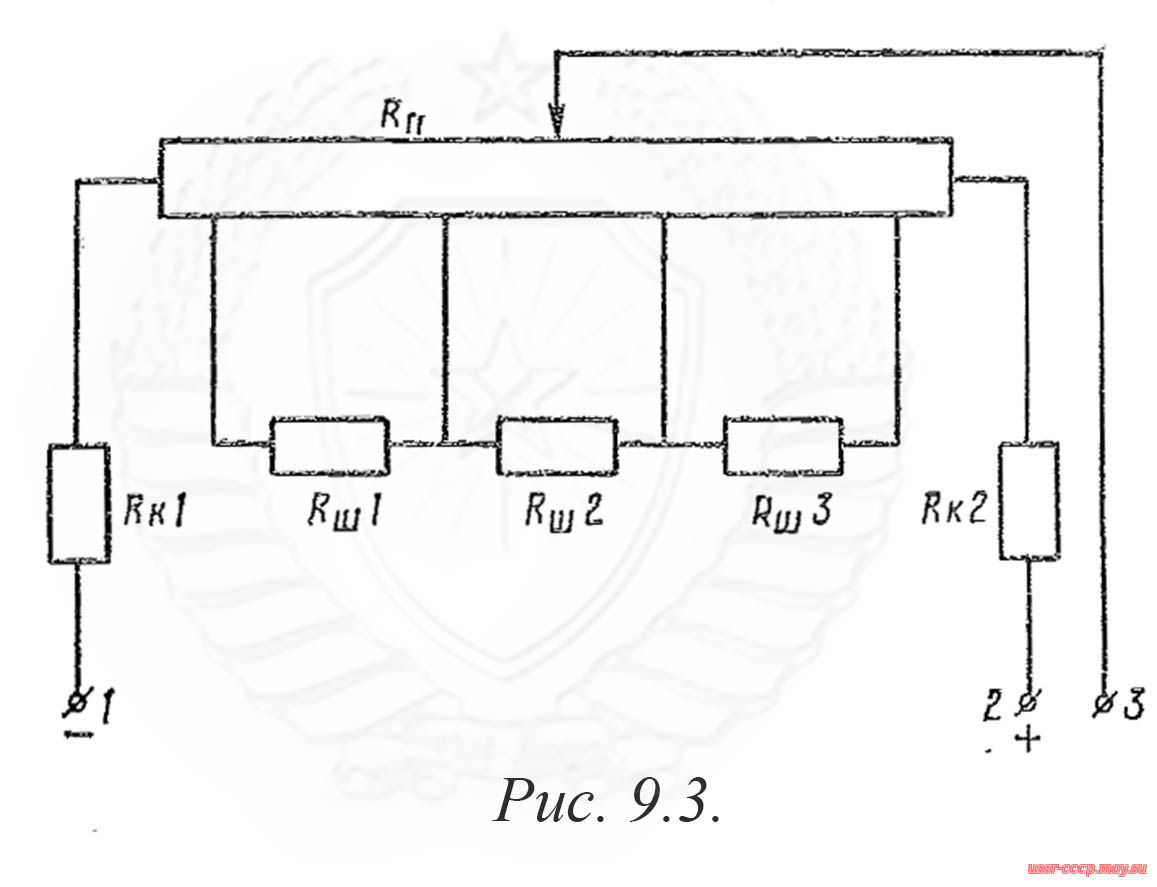
Рис. 9.3. Схема электрическая датчика ДВбП-13 (ДВбП-15).
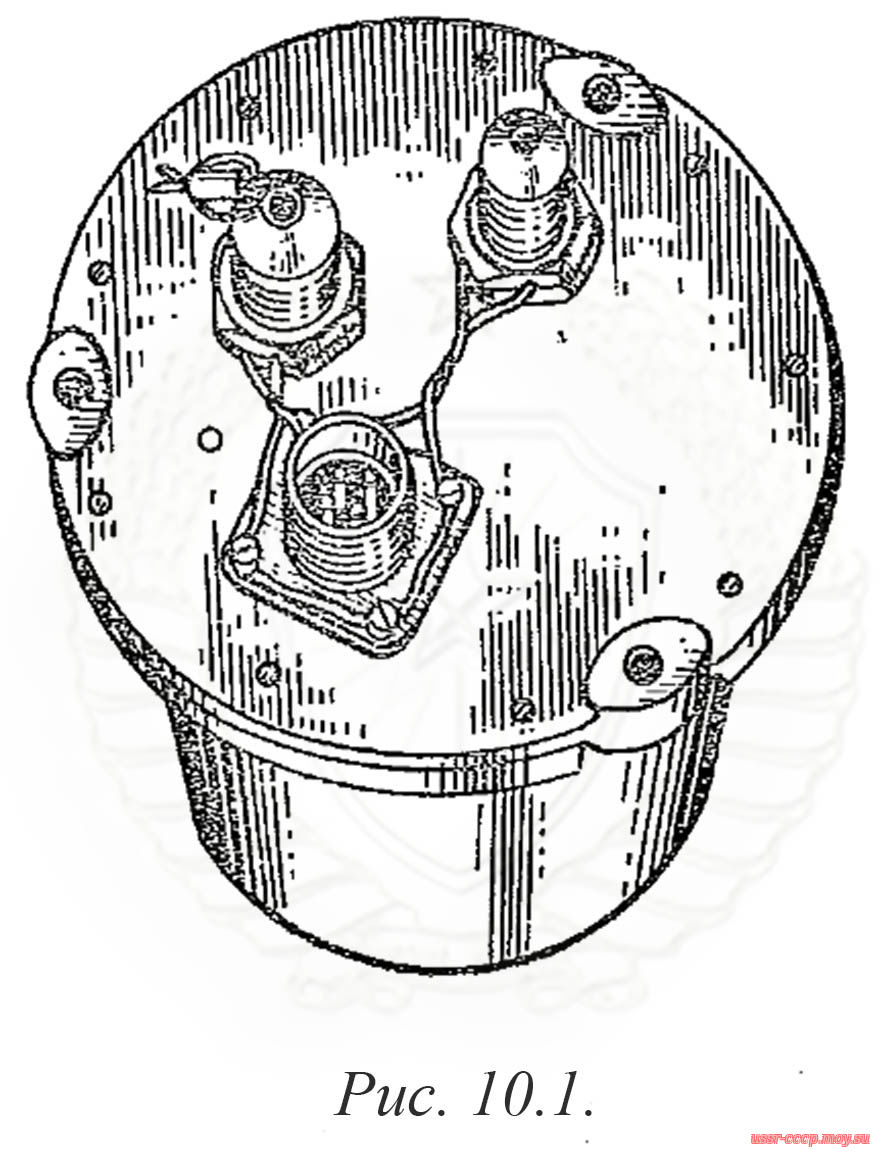
ПРИЛОЖЕНИЕ 10 КРАТКОЕ ОПИСАНИЕ ДАТЧИКА ИЗБЫТОЧНОГО ДАВЛЕНИЯ ДДиП (-0,1÷+0,85) 1. Назначение Потенциометрический датчик избыточного давления типа ДДиП (рис. 10.1) предназначен для измерения избыточного давления воздуха между кабиной летчика и атмосферой и выдачи сигнала, пропорционального измеряемому давлению.
Рис. 10.1. Датчик избыточного давления ДДиП (-0,1...+0,85).
95 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
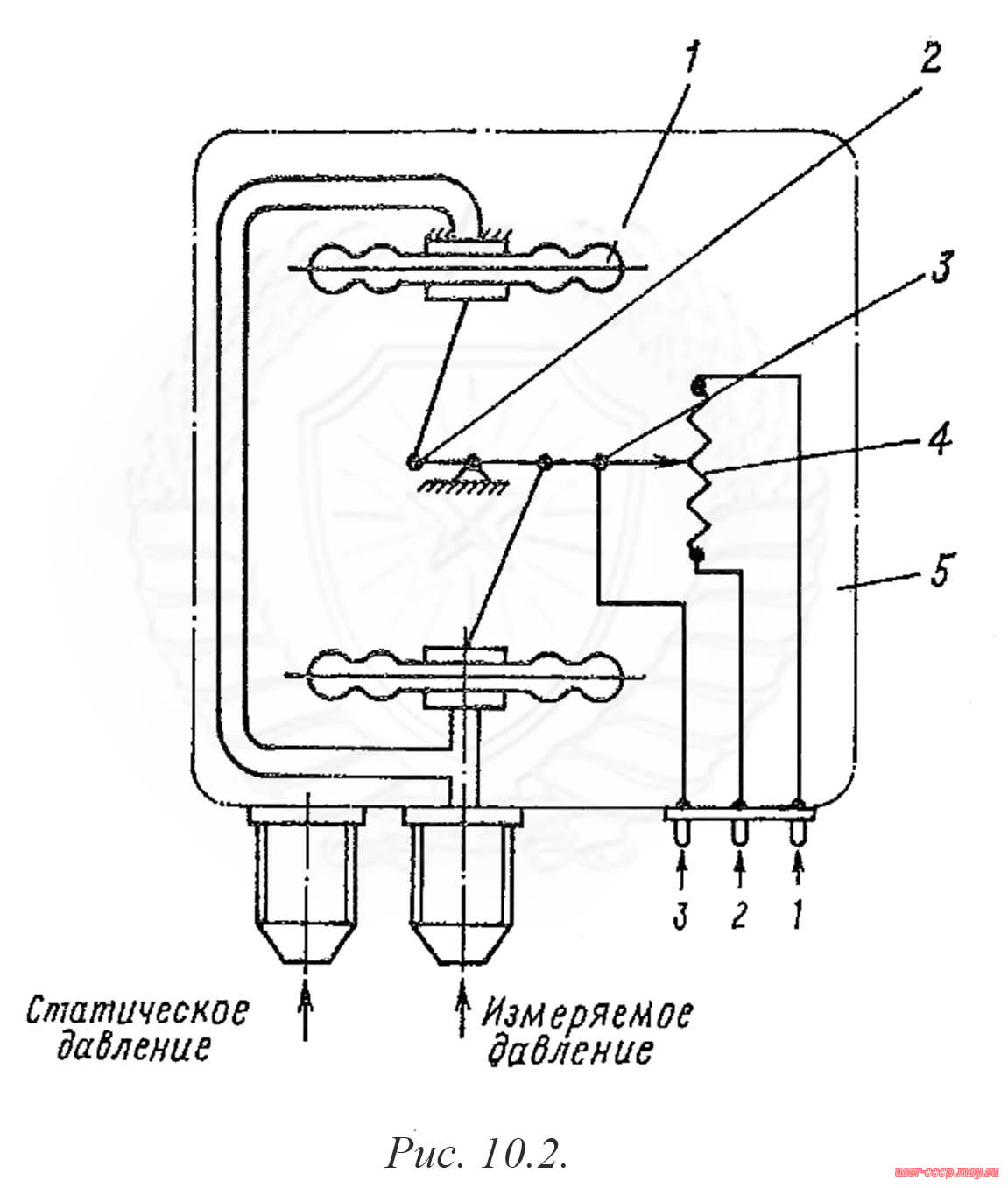
Рис. 10.2. Схема принципиальная датчиков ДДиП (-0,1...+0,85). 1—чувствительный элемент (манометрическая коробка); 2—кривошатунный-шатунный механизм; 3—щётка; 4—потенциометр; 5—корпус.
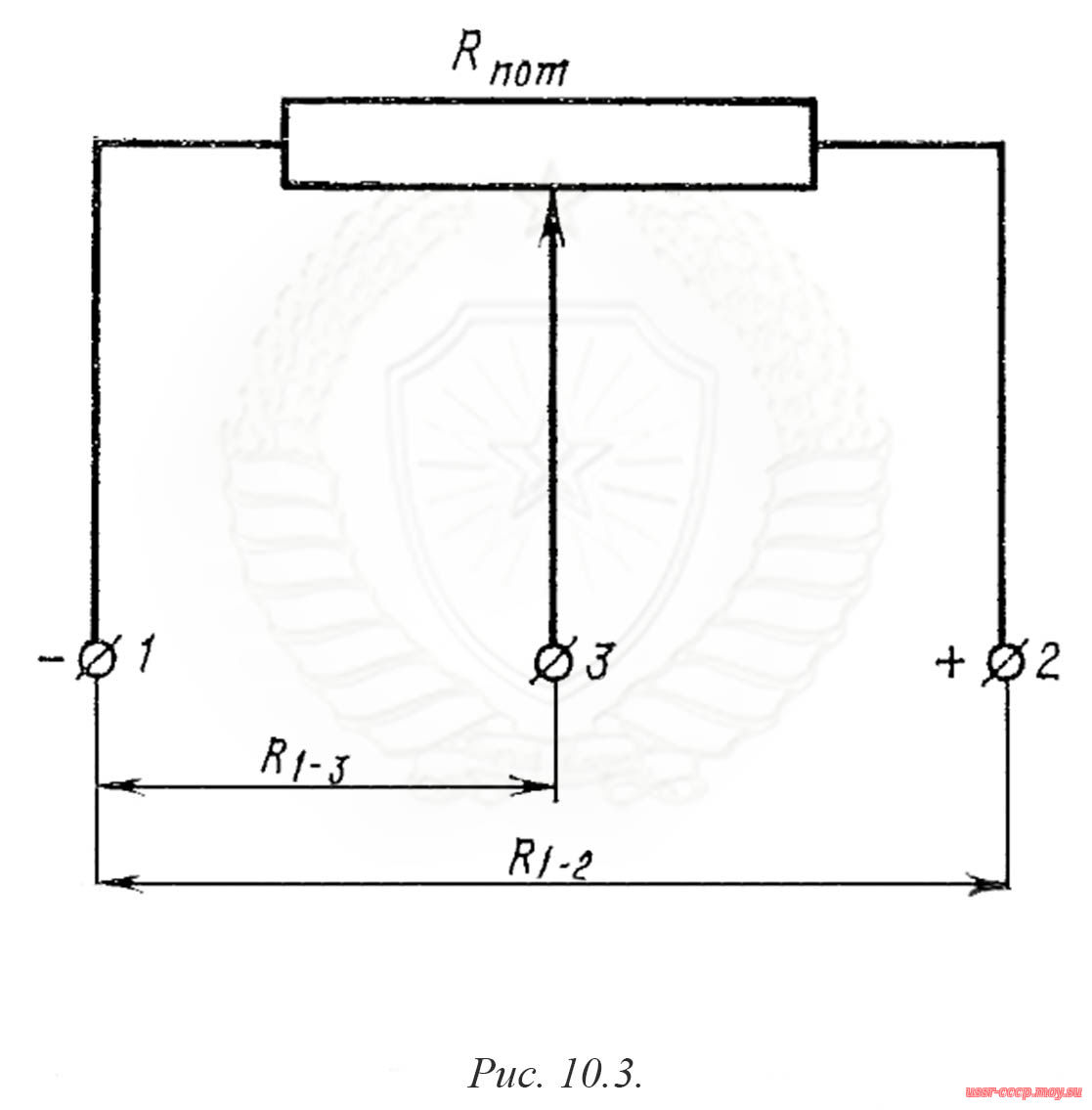
Рис. 10.3. Схема электрическая датчика ДДиП (-0,1...+0,85).
96 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
2. Основные технические данные Напряжение питания постоянного тока от блока питания БП-7 — 6,3 В. Выходное сопротивление датчика между клеммами 1 и 2 — 1600±700 Ом. Диапазон измерения давлений — от -0,1 до +0,85 кгс/см2. Датчик имеет осредненную тарировочную таблицу, выражающую зависимость между измеряемым перепадом давления и выходным относительным сопротивлением при температуре +25±10°С в тарируемых точках: -0,1; 0; +0,1; +0,3; +0,5; +0,7; +0,8; +0,85 кгс/см2. Погрешность датчика — не более 3% выходного относительного сопротивления. Нелинейность тарировочной характеристики датчика при температуре +25±10°С — ±2% выходного относительного сопротивления. Температурный интервал — от -60 до +60°С. Масса датчика — не более 800 г.
3. Принцип работы датчика Принцип работы датчика основан на использовании упругих свойств чувствительного элемента (манометрических коробок). Полости манометрических коробок через динамический штуцер соединены с кабиной лётчика, а корпус датчика через статический штуцер — с приёмником воздушного давления. При измерении величины перепада между давлениями в кабине и окружающей самолёт атмосфере мембраны манометрических коробок 1 прогибаются (две коробки применены для создания устойчивости при воздействии на датчик вибрационных и линейных нагрузок). Подвижный центр манометрических коробок совершает при этом возвратно-поступательное движение, которое посредство» кривошипно-шатунного передаточного механизма 2 (тяга, серьга и ось) преобразуется во вращательное движение оси и далее перемещение щёткодержателя со щётками 3 по потенциометру 4. При этом каждому значению перепада давлений соответствует определенное положение щётки 3 на потенциометре 4, а, следовательно, и определенная величина выдаваемого датчиком выходного относительного сопротивления. В случае равенства давления в кабине и в окружающей самолёт атмосфере манометрические коробки находятся в положении, соответствующем перепаду давлений, равному нулю, при этом датчик выдает выходное относительное сопротивление 50±5%. Если значение максимального перепада давлений положительное, т. е. давление в кабине больше атмосферного давления, то датчик выдаёт относительное сопротивление не более 98%; если значение максимального перепада давлений отрицательное, т. е. давление в кабине меньше атмосферного давления, то датчик выдаёт относительное сопротивление от 3 до 10%. За относительное сопротивление принимается отношение сопротивления между клеммами 1 и (рис. 10.3) к сопротивлению между клеммами 1 и 2, выраженное в процентах.
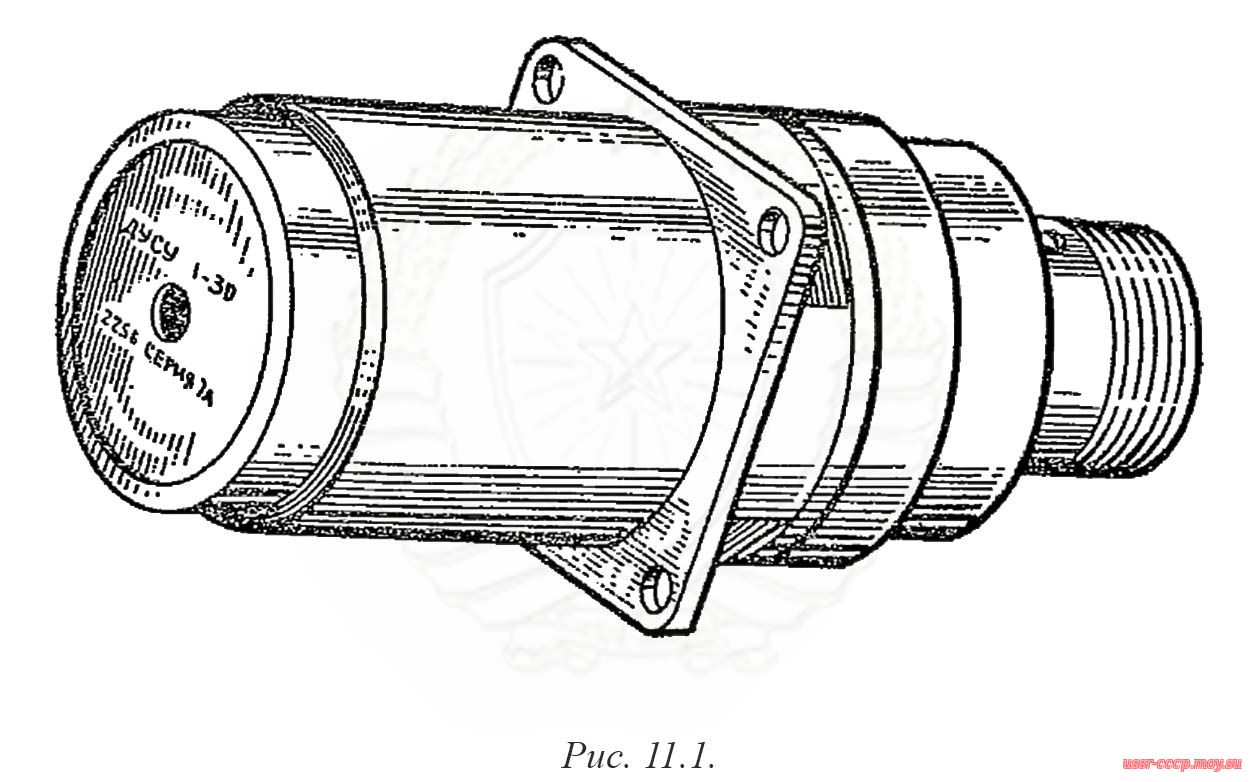
ПРИЛОЖЕНИЕ 11 КРАТКОЕ ОПИСАНИЕ ДАТЧИКА УГЛОВОЙ СКОРОСТИ ДУСУ-1-30АС 1. Назначение Унифицированный датчик угловой скорости типа ДУСУ (рис. 11.1) предназначен для выдачи электрического сигнала в систему МСРП-12-96, пропорционального угловой скорости летательного аппарата вокруг одной из его осей.
2. Основные технические данные Диапазон измеряемой угловой скорости — ±30 град./с. Температурный интервал — от -60 до +60 °С. Порог чувствительности датчика в диапазоне температур от -60 до +60°С — не более 400±58 Гц, Масса датчика — не более 450 г.
97 СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Рис. 11.1. Датчик угловой скорости ДУСУ-1-30АС
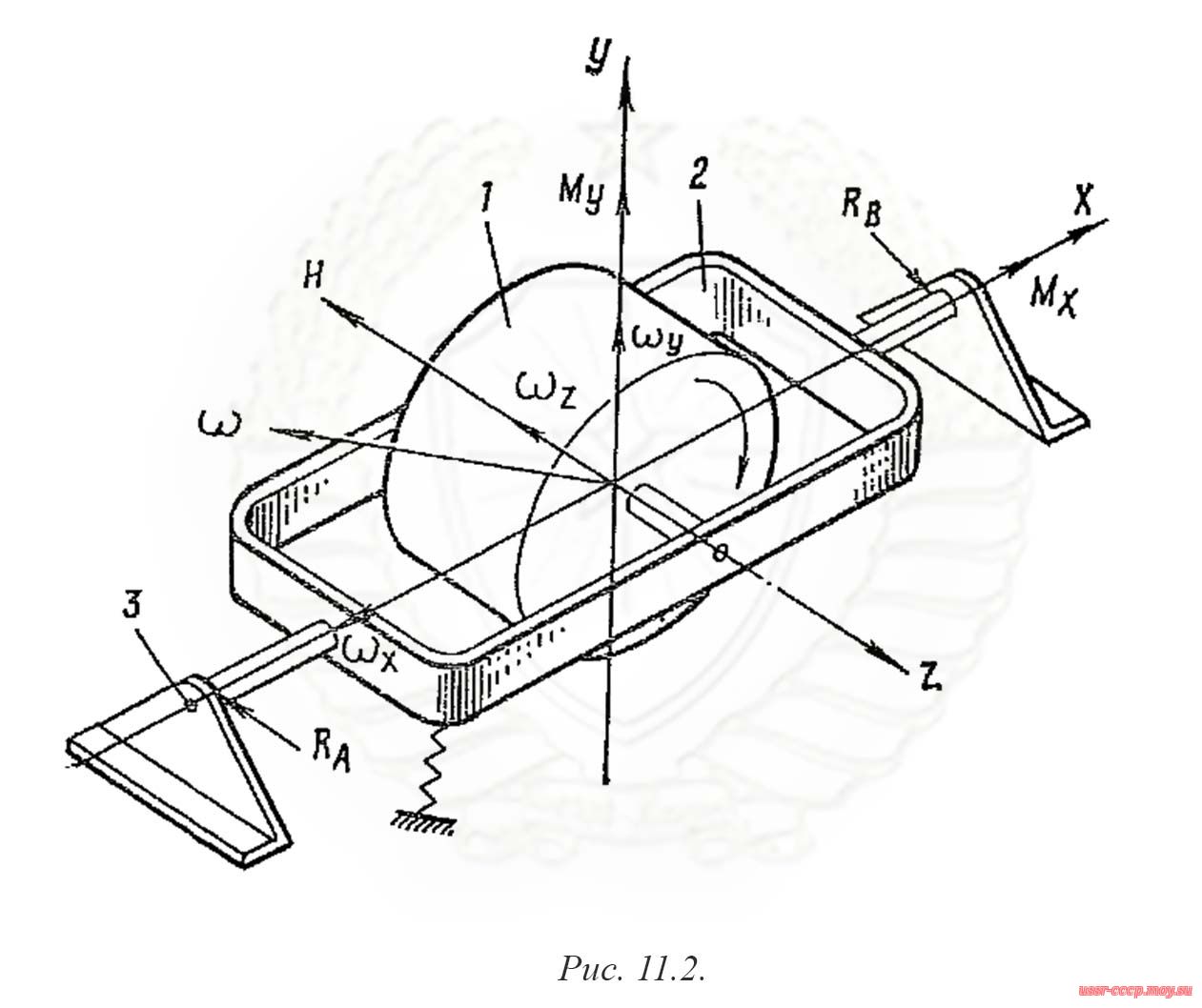
Рис. 11.2. Схема кинематическая датчика угловой скорости ДУСУ-1-30АС двухстепенного гироскопа. 1—ротор гироскопа; 2—рамка; 3—подшипник.
[80—85] <<< [86-97] >>> [98—108] Источник: https://ussr-cccp.moy.su/index/biblioteka_sssr/0-19 Просмотров: 260
|
| |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||