 НКП-4 — Навигационный курсовой прибор НКП-4 — Навигационный курсовой прибор
Статья под цифровой редакцией подготовлена: Орловым Геннадием Викторовичем (08.11.1965) — Советским выдающимся публицистом СССР — Прозаиком СССР — Историком СССР
Страна: СССР.
Название: НКП-4.
Тип: НКП.
Самолёт: Ил-18.
Создан: ?
Завод: ?
Отрасль: Производство авиационной техники.
 НКП-4 — Навигационный курсовой прибор. Предназначен для индикации положения самолёта в пространстве и формирования сигналов отклонения от заданного курса ∆ψ. НКП-4 — Навигационный курсовой прибор. Предназначен для индикации положения самолёта в пространстве и формирования сигналов отклонения от заданного курса ∆ψ.
Повествование
Прибор НКП-4 комбинированный и обеспечивает индикацию:
- текущего курса ψ самолёта;
- заданного курса ψз;
- курсового угла радиостанции φ;
- отклонение ε самолёта от равносигнальной зоны курса или заданной линии пути;
- отклонение ξ самолёта от глиссады или заданной траектории снижения.
Бленкеры прибора сигнализируют об исправности каналов курса и глиссады радиотехнических средств посадки и навигации.
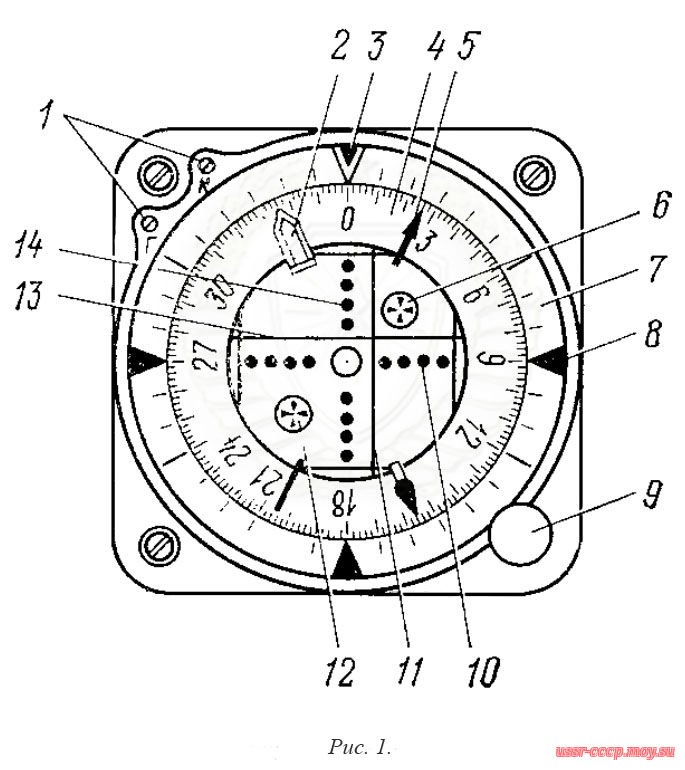
Рис. 1. Лицевая часть - Навигационного курсового прибор НКП-4.
2—стрелка заданного курса; 3—индекс; 4—шкала курсов; 5—стрелка курсового угла: 6—бленкер; 7—шкала отклонения; 8—индекс треугольный; 9—кремальера; 10, 14—шкала из точек; 11—стрелка заданной линии пути; 12—глиссада; 13—стрелка глиссады;
И н д и к а ц и я п а р а м е т р о в. Курс самолёта отсчитывается на шкале курса 4 относительно неподвижного треугольного индекса 3. Заданный курс отсчитывается на шкале курса 4 по стрелке 2 заданного курса. При полёте самолёта с заданным курсом стрелка 2 устанавливается против индекса 3. С разворотом самолёта вправо шкала курсов 4 разворачивается влево относительно индекса 3 и на оборот. Стрелка 2 заданного курса при этом разворачивается синхронно со шкалой курсов 4. Смещение стрелки 2 заданного курса относительно индекса 3 по шкале 7 указывает на отклонение самолёта от заданного курса самолёта.
Линия 0—180° шкалы курсов 4 имитирует магнитный (истинный) меридиан, а линия проходящая через верхний и нижний треугольные индексы, имитируют продольную ось самолёта. Курсовой угол радиостанции отсчитывается по стрелке 5 на шкале 7, магнитный пеленг — на шкале 4 по стрелке 5.
Положение самолёта относительно равносигнальной зоны курса или заданной линии пути (ЗЛП) указывается стрелкой 11 по шкале из точек 10. Среднее положение стрелки 11 указывает, что самолёт находится на заданной траектории. Отклонение стрелки 11 от среднего положения влево или вправо указывает лётчику, в какой стороне относительно самолёта находится заданная траектория.
Положение самолёта относительно глиссады указывает стрелка 13 по шкале из точек 14. Отклонение стрелки 13 от среднего положения указывает лётчику сторону нахождения глиссады.
Открытие бленкера 6 курса (глиссады 12) в зоне действия курсового (глиссадного) маяка сигнализирует об отказе канала курса (глиссады) радиотехнических средств навигации и посадки. Кремальера 9 служит для установки заданного курса.
Треугольные индексы 8 служа для удобства выполнения предпосадочного манёвра.
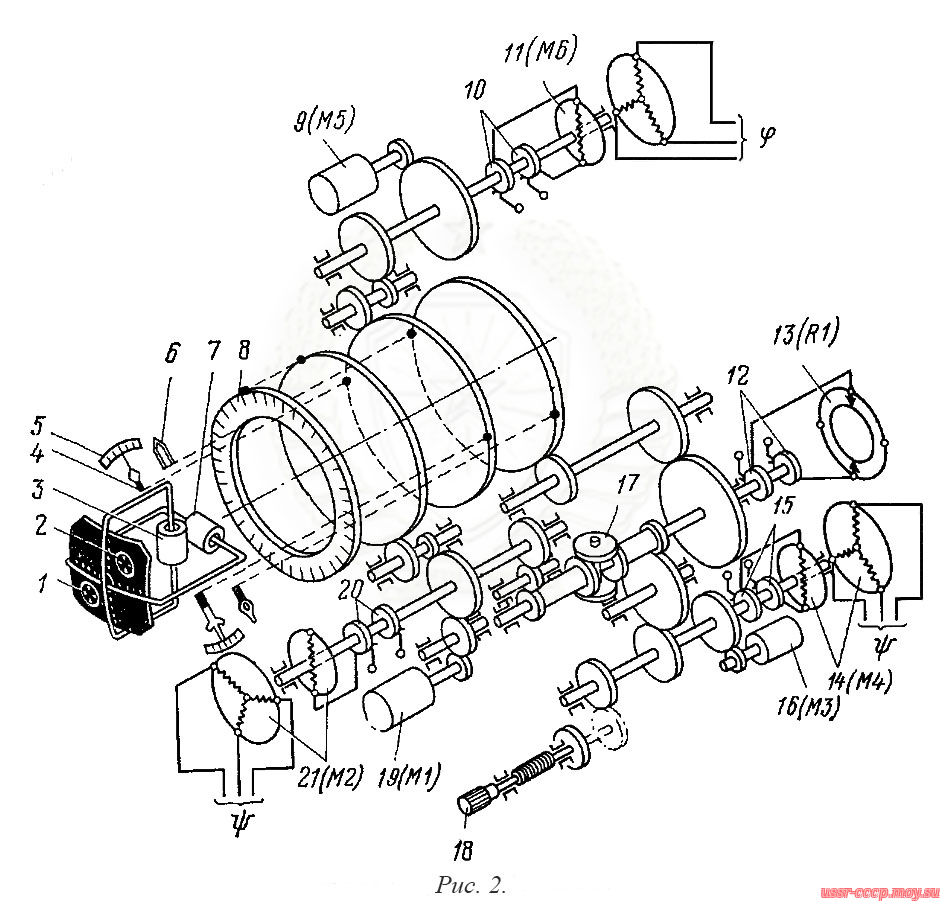
Рис. 2. Кинематическая схема - Навигационного курсового прибор НКП-4.
1—сигнализации исправности канала глиссады РТС; 2—сигнализация исправности канала курса РТС; 3—указателя отклонения от равносигнальной зоны курса (Э1); 4—стрелка; 5—шкала; 6—стрелка заданного курса; 7—указателя отклонения от глиссады (Э2); 8—шкала курса; 9—двигатель (М5); 11—сельсин (М6); 14—сельсин (М4); 16—двигатель (М3); 17—дифференциал; 19—двигатель (М1); 21—сельсин (М2);
Прибор НКП-4 (см. рис. 2) состоит из следующих узлов:
- следящей системы курса, в которую входят двигатель 19 (М1), сельсин 21 (М12) и шкала курса 8;
- следящей системы заданного курса, в которую входят двигатель 16 (М3), сельсин 14 (М4) и стрелка заданного курса 6;
- следящей системы курсовых углов радиостанции, в которую входят двигатель 9 (М5), сельсин 11 (М6), стрелка 4 и шкала 5;
- магнитоэлектрической системы 3 (Э1) — указателя отклонения от равносигнальной зоны курса;
- магнитоэлектрической системы 7 (Э2) — указателя отклонения от глиссады;
- магнитоэлектрической системы 2 сигнализации исправности канала курса РТС;
- магнитоэлектрической системы 1 сигнализации исправности канала глиссады РТС.
В приборе НКП-4 в следящих системах используется двигатели-генераторы ДГ-0,5ТА. Дифференциал служит для сложения углов ψз и ψ.
Следящая система индикации курса
Следящая система индикации курса состоит из:
- сельсина-датчика УШ (КС-6, КС-8);
- сельсина-приёмника М-2 (С-30ВП);
- двигателя-генератора М1 (ДГ-0,5ТА);
- подвижная шкала курсов прибора НКП-4;
- 3-го канала усиления У-20Н.
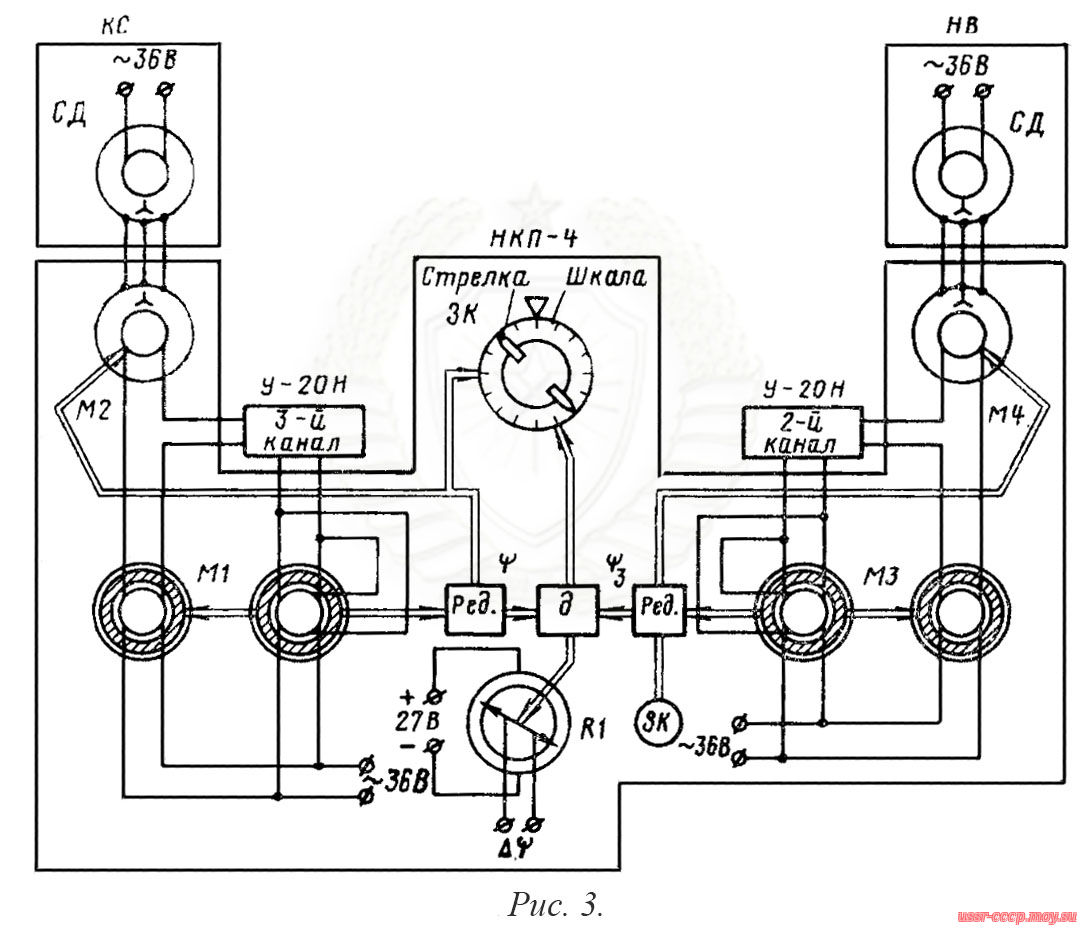
Рис. 3. Система формирования сигнала ∆ψ в НКП-4.
При изменении курса самолёта между сельсинами УШ и М2 возникает рассогласование. Сигнал рассогласования с ротора сельсина М2 после усиления в 3-ем канале У-20Н подаётся на двигатель М1, который через редуктор поворачивает шкалу курсов, ротор сельсина М2 и первую входную ось механического дифференциала d (рис. 3). После согласования следящей системы шкала НКП-4 и первая входная ось механического дифференциала будут повёрнуты на угол курса самолёта ψ.
Для осуществления скоростной обратной связи сигнал, пропорциональной скорости вращения двигателя М1, с тахогенератора этого двигателя суммируется в противофазе на входе 3-го канала У-20Н с сигналом рассогласования следящей системы.
Сигнал ∆ψ формируется в приборе НКП-4. Следящая система заданного курса (СД, М4, М3, 2-ой канал) не задействована (см. рис. 3). Заданный курс ψз устанавливается в приборе НКП-4 кремальерой ЗК вручную. Вращение кремальеры ЗК передаётся на вторую ось дифференциала d и через него на стрелку заданного курса (ЗК). Вводимый заданный курс ψз устанавливается по стрелке ЗК на подвижной шкале курсов НКП-4. Если после установки заданного курса самолёт изменяет курс, то работает следящая система курса и двигатель М1 поворачивает шкалу курсов и через дифференциал стрелку ЗК на один и тот же угол, обеспечивая этим их синхронное перемещение.
Так как первая входная ось дифференциала d поворачивается на угол курса ψ, а вторая входная ось — на угол ψз, то выходная ось его поворачивается на угол, равный алгебраической сумме углов ψ и ψз, т. е. с помощью дифференциала d решается уравнение
∆ψ=ψз±ψ.
Так как с выходной осью дифференциала связаны щётки потенциометра R1, то с него через резисторы R2, R4 снимается и подаётся в вычислитель В-12 сигнал постоянного тока ∆ψ, пропорциональный углу отклонения самолёта от заданного курса.
Сигналы ∆ψ, сформированные на потенциометрах R1 левого и правого приборов НКП-4, подаётся на блоки 3 и 4 левого и правого вычислителя В-12.
Для увеличения надёжности системы потенциометры R1 левого и правого приборов НКП-4 соединены параллельно через клеммы соединительной коробки.
Следящая система индикации КУР
Следящая система индикации КУР состоит из:
- сельсина-датчика (А-8) радиокомпаса АРК-11;
- сельсина-приёмника М6 (С-30ВП);
- двигателя-генератора М5 (ДГ-0,5ТА);
- стрелки и шкалы КУР прибора НКП-4;
- 4-ый канал усиления У-20Н.
При изменении КУР между сельсинами А-8 и М6 возникает рассогласование. Сигнал рассогласования с ротора сельсина М6 после усиления в 4-ом канале У-20Н подаётся на двигатель М5, который через редуктор поворачивает стрелку КУР и ротор сельсина М6, согласуя следящую систему. После её согласования двигатель М5 останавливается, а а по стрелке на внешней неподвижной шкале прибора НКП отсчитывается КУР.
Сигнал с тахогенератора двигателя М5 обеспечивает скоростную обратную связь. Следящая система КУР включается при включении радиокомпаса АРК-11 напряжением 45 В 400 Гц. Для гашения напряжения до 36 В и для сдвига фаз применяется резистор R28 и конденсатор С9, расположенные в блоке БР-46А.
Прохождение сигналов ε и ξ от радиотехнических средств
Как уже отмечалось датчиками сигналов ε и ξ отклонения самолёта от заданных траекторий являются радиоприёмные устройства аппаратуры «Курс МП» или РСБН-2С («Свод»).
Сигналы ε и ξ от радиотехнических датчиков поступают:
на приборы НКП-4 и ПП-1ПМ для индикации положения самолёта относительно заданных траекторий;
в комбинированный блок БК-5 для линейного усиления. С выхода блока БК-5 сигналы подаются в оба вычислителя В-12 и автопилот АП-6Е или АП-6ЕМ-ЗП.
В систему «Путь-4МПА» сигналы ε и ξ могут поступать первого или второго полукомплекта аппаратуры «Курс МП», а также от аппаратуры РСБН-2С в зависимости от того, в каком положении находится переключатель селектора радиосредств (см. рис. 4).
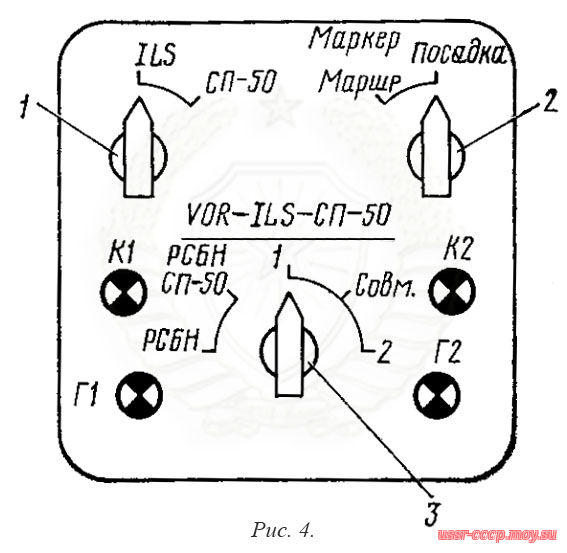
Рис. 4. Передняя панель селектора радиосистемы
1—переключатель системы посадки СП-50М, ILS или VOR; 2—переключатель маркерного приёмника; 3—переключатель режимов.
В положении 1 оба прибора НКП-4 и ПП-1ПМ, и блок БК-5 подключается к первому полукомплекту «Курс МП», работающему в одном из режимов «СП-50», «ILS», «VOR».
В положении Совм. оба прибора ПП-1ПМ, левый НКП-4 и блок БК-5 подключается к первому, а правый НКП-4 — к второму полукомплекту «Курс МП».
В положении 2 оба прибора ПП-1ПМ, левый НКП-4 и блок БК-5 подключается к второму полукомплекту «Курс МП».
В положении РСБН курсовые планки и бленкеры НКП-4 подключаются к аппаратуре РСБН (режимы «Азимут и СРП»).
Указатели положения обоих НКП-4 подключаются последовательно, а вход блока БК-5 — параллельно двум последовательно соединённым указателям. Бленкеры обоих НКП-4 подключаются параллельно к соответствующим цепям.
В положении «РСБН—СП-50» блок БК-5, курсовая планка и бленкер левого НКП-4 подключаются к навигационному каналу аппаратуры «РСБН-2С» («Свод»), а правый НКП-4 — к первому полукомплекту «Курс МП», работающему в режиме «СП-50».
Сигнал ε с выхода курсового канала аппаратуры «Курс МП» через блок коммутации (БК) подаётся на магнитоэлектрические системы указателей НКП-4, перемещающие курсовые планки, по которым определяют положение заданных траекторий относительно самолёта. Одновременно сигнал:
- ε через нормально замкнутые контакты реле Р6, Р7;
- ограничивающие резисторы R20, R21 в режиме «Посадка»;
- R26, R27 в режиме «Азимут»;
- R22, R23 в режиме «СРП»;
- R14, R13 в режиме «VOR», расположенные в блоке БР-46А, подаётся на вход 4-го блока БК-5.
С выхода 4-го канала (с резистора нагрузки R28) усиленный сигнал ε подаётся на левый и правый вычислители В-12 и автопилот АП-6Е или АП-6ЕМ-ЗП (клеммы Ж1, Ж2 РК).
Сигнал ξ с выхода глиссадного канала аппаратуры «Курс МП» через блок коммутации подаётся на магнитоэлектрические системы указателей НКП-4, перемещающие глиссадные планки, которые указывают положение глиссады планирования (траектории снижения) относительно самолёта. Одновременно сигнал ξ через нормально-замкнутые контакты Р7 и ограничивающие резисторы R6, R7 в режиме «Посадка», резисторы R4, R5 в режиме «Пробивание», расположенные в блоке БР-46А, подаётся на вход 3-го канала блока БК-5. Усиленный сигнал ξ с выхода 3-го канала блока БК-5 через резистор R51, расположенный в блоке БР-46А, подаётся в левый и правый вычислители В-12, в приборы ПП-1ПМ и в автопилот АП-6Е или АП-6ЕМ-ЗП.
Сигналы ε и ξ к системе «Путь-4МПА» подключаются с помощью реле блока коммутации аппаратуры «Курс МП».
При автоматическом управлении для обеспечения устойчивости системы «Самолёт—БСУ-ЗП» до перехода на визуальный полёт в системе «Путь-4МПА» введено автоматическое уменьшение передаточных отношений по сигналам ε, ξ и их производных рε, рξ. При нажатии кнопки-лампы «Глис.» на объединённым пульте управления системы БСУ-ЗП подаётся (с АП-6Е или АП-6ЕМ-ЗП) напряжение +27 В на реле Р6 блока БР-46А, которые в цепь сигнала ε подключает добавочные резисторы R18, R19, что вызывает уменьшение передаточных отношений Rε, Rрε на 25%. Через 50 с после нажатия на кнопку-лампу «Глис.» с АП-6Е или АП-6ЕМ-ЗП подаётся напряжение —27 А на реле Р7 блока БР-46А, которое своими контактами подключает добавочные резисторы R57, R58 в цепь сигнала -, а резисторы R2, R3 в цепь сигнала ξ. Это вызывает уменьшение передаточных отношений Rε, Rрε на 20%, а передаточных отношений Rξ, Rрξ на 30%.
Материалы
Орлов Г.В. «НКП-4 — Навигационный курсовой прибор» (повествование 07.01.2023).
Источник
https://ussr-cccp.moy.su/index/aviacija_sssr/0-10
https://ussr-cccp.moy.su/publ/aviacija_sssr/oborudovanie_samoljotov_sssr/put_4mpa_pilotazhno_navigacionnaja_
sistema/218-1-0-4073
Источник: https://ussr-cccp.moy.su/index/aviacija_sssr/0-10 | 


















 1
1