 АТ-2 — Автомат триммирования АТ-2 — Автомат триммирования
Статья под цифровой редакцией подготовлена: Орловым Геннадием Викторовичем (08.11.1965) — Советским выдающимся публицистом СССР — Прозаиком СССР — Историком СССР
Страна: СССР.
Название: АТ-2.
Тип: ?
Самолёт: Ил-18
Создан: ?
Завод: ?
Отрасль: Производство авиационной техники.
 АТ-2 — Автомат триммирования предназначен для — автоматического триммирования руля высоты, индикации усилий в тягах управления рулём высоты, сигнализации о превышения допустимых усилий в тягах управления рулём высоты. АТ-2 — Автомат триммирования предназначен для — автоматического триммирования руля высоты, индикации усилий в тягах управления рулём высоты, сигнализации о превышения допустимых усилий в тягах управления рулём высоты.
Повествование
Структурная схема АТ-2
Чувствительным элементом АТ-2 является датчик усилий ДДУ, установленный в тяге управления рулём высоты.
Он воспринимает усилия в тяге управления рулём высоты и преобразует их в сигналы переменного тока, амплитуда которых зависит от величины, а фаза — от направления действий усилий (растяжение или сжатие).
С датчика сигналы подаются на фазовый дискриминатор ФД блока БУТ, где они усиливаются и преобразуются в сигналы постоянного тока, которые подаются на вход двухтактного релейного магнитного усилителя МУ и указатель УАТ. При возникновении усилий в тяге управления рулём высоты магнитный усилитель срабатывает и напряжение +27 В подаётся на электромеханизм УТ-15, реле времени РВ-2 (5 с) и узел блока контроля БУТ.
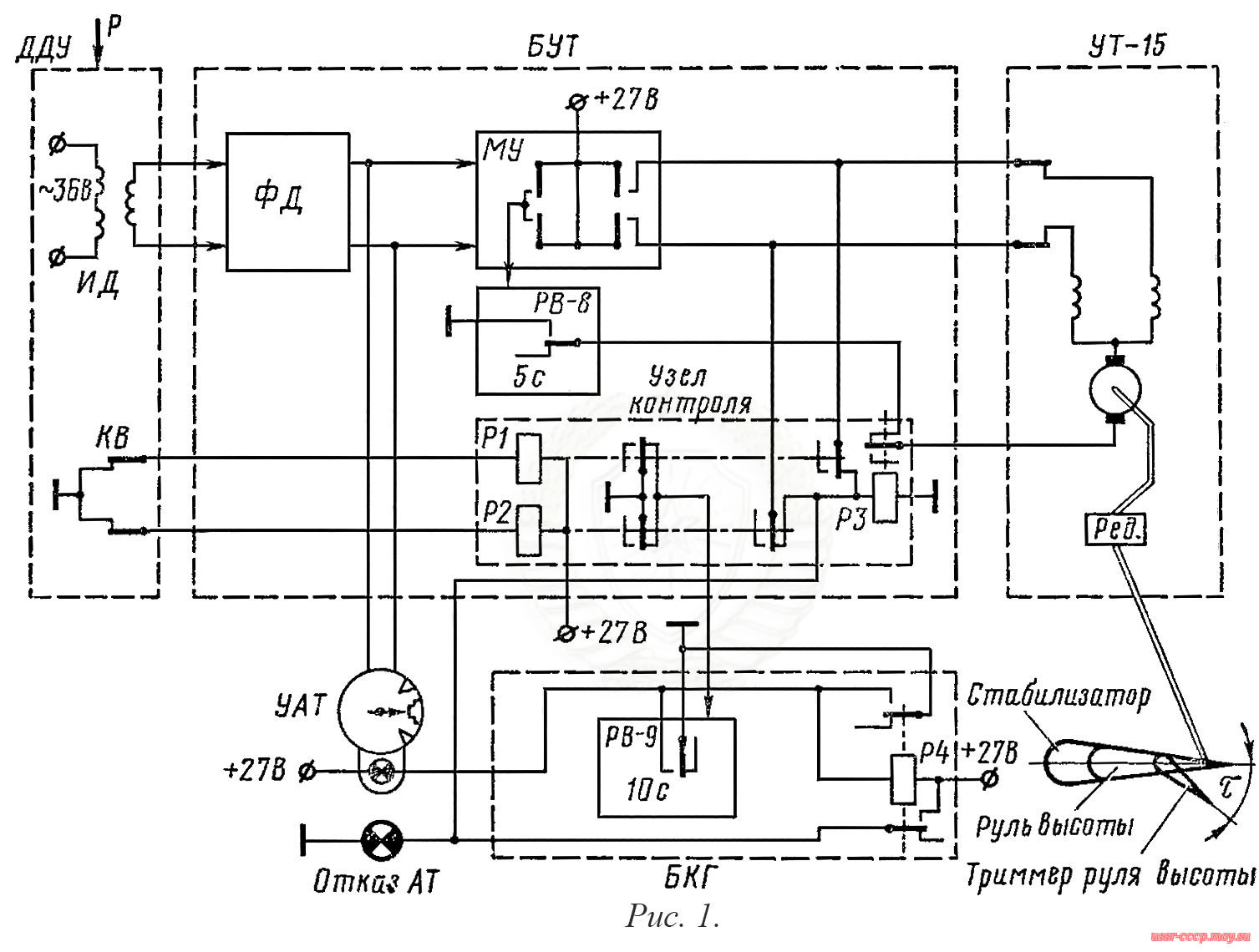
Рис. 1 Структурная схема АТ-2
Спустя 5 с реле времени РВ-8 срабатывает и через его контакты на электромеханизм УТ-15 подаётся напряжение -27 В. Электромеханизм отклоняет триммер руля высоты до исчезновения усилия в тяге, после чего УТ-15 выключается.
Датчик ДДУ имеет две пары контактов, размыкающихся в случае превышения усилий в тягах управления рулём высоты допустимой величины.
При размыкании контактов ДДУ обесточивается реле Р1 (или Р2) блока БУТ и через его контакты -27 В подаётся на реле РВ-9 (10 с) блока БКГ, а +27 В — на реле Р3 и сигнальную лампочку «Отказ АТ».
Через 10 с реле времени РВ-9 срабатывает и включает реле Р4, которое своими контактами подключает питание на сигнальную лампочку УАТ и дублирует подачу питания на лампочку «Отказ АТ». Задержка по времени 10 с необходима для исключения частого срабатывания сигнальной лампочки УАТ при возникновении больших кратковременных усилий в тяге управления рулём высоты.
При срабатывание и выключение АТ-2 осуществляется одновременно с включением продольного канала автопилота АП-6Е или АП-6ЕМ-ЗП. Для повышения безопасности полёта с включённым АТ-2 при отказе электромеханизма УТ-2 при отказе электромеханизма УТ-15, вызывающего одностороннюю перекладку триммера, на самолёте Ил-18 в месте соединения электромеханизма с системой управления триммером руля высоты установлена срезающая чека. При пересиливании автомата АТ-2 лётчиком чека срезается и триммер отсоединяется от электромеханизма УТ-15.
Электрическая схема АТ-2
Питание АТ-2 постоянным током +27 В осуществляется через три АЗС:
- АЗС-5 «Механизм управления» — в цепи питания УТ-15;
- АЗС-2 «Указатель усилий» — в цепи питания коммутационных и усилительных элементов блока БУТ-3;
- АЗС-2 («Контроль АТ») — в цепи питания элементов контроля и сигнализации.
Питание АТ-2 переменным током осуществляется от сети 36 В 400 Гц через два предохранителя.
При включении продольного канала АП напряжение +27 В подаётся на реле Р1 блока БУТ-3. Включение АТ-2 возможно только при включённом выключателе «АТ-2», расположенном на приборной доске левого лётчика. Реле Р1 срабатывает и через его контакты 2—3 напряжение +27 В подаётся на контакты 2 реле Р1, Р2 узла контроля, а через контакты 5—6 реле Р1 подаётся переменное напряжение на магнитный усилитель.
При возникновении усилия в тяге управления рулём высоты с ДДУ снимается сигнал, который через фазовый дискриминатор ФД подаётся на вход магнитного усилителя МУ и он срабатывает.
В зависимости от направления усилия (сжатие или растяжение) срабатывает одна или вторая половина магнитного усилителя, а следовательно реле Р1 (или Р2) МУ. Через контакты 2—3 этих реле +27 В подаётся на узел контроля блока БУТ-3 (контакты 7 реле Р3, Р4, Р5, Р6), а через диод Д1 (или Д2) — на одну из обмоток электромеханизма УТ-15. Одновременно через контакты 5—6 реле Р1 (или Р2) МУ +27 В подаётся на реле времени РВ-8.
Через 5 с реле времени РВ-8 срабатывает и замыкает цепь питания реле Р2. Через контакты 2—3 реле Р2 и через контакты 5—4 реле Р1 и Р2 узла контроля -27 В подаётся на электромеханизм УТ-15, который включается и отрабатывает триммер руля высоты в сторону снятия усилий в тяге управления рулём высоты.
При снятии усилия магнитный усилитель отпускает, а реле Р1 (или Р2) МУ обесточивается.
При обесточивании реле Р1 (или Р2) контактами 2—3 отключаются +27 В от обмотки УТ-15, а контактами 5—6 отключается +27 В от реле времени РВ-8, которое отпускает, отключая -27 В от электромеханизма УТ-15.
Если при работе АТ-2 усилие в тяге не уменьшается, а увеличивается, то при растяжении размыкаются контакты 1—2, а при сжатии — контакты 3—4 датчика ДДУ. При этом обесточиваются реле Р3, Р4 (или Р5, Р6) узла контроля блока БУТ-3.
Через контакты 7—8 этих реле +27 В подаётся на реле Р1 и Р2 узла контроля, а через контакты 3—4 реле Р3, Р4 (или Р5, Р6) подаётся -27 В на реле времени РВ-9 блока БКГ.
При подаче +27 В на реле Р1 и Р2 узла контроля они срабатывают, контактами 2—3 блокируются и подают +27 В на лампочку «Отказ АТ», а контактами 4—5 отключают -27 В от электромеханизма УТ-15.
При подаче -27 В на реле времени РВ-9 блока контроля гировертикалей (БКГ) оно через 10±2 с срабатывает и включает реле Р1 блока БКГ. Реле Р1 срабатывает, своими контактами блокирует подачу +27 В на лампочку «Отказ АТ» и подаёт -27 В на лампочку «предельных» усилий указателя УАТ.
Особенности устройства агрегатов АТ-2
Д а т ч и к у с и л и й ДДУ. Дублированный датчик усилий (ДДУ) является чувствительным элементом автомата триммирования. Он воспринимает усилия в тяге управления рулём высоты и выдаёт электрические сигналы, пропорциональные этим усилиям. Кроме того, датчик выдаёт ещё постоянный сигнал при достижении в тяге управления рулём высоты предельных усилий. Поэтому датчик называется дублированным.
Датчик ДДУ состоит из двух основных узлов — пружины и индукционного датчика.
Пружина воспринимает усилия, действующие на ДДУ. Перемещение пружины через передаточно-множительный механизм (ⅈ=10) передаётся на рамку индукционного датчика (ИД). При сжатии ДДУ рамка ИД поворачивается в одну сторону относительно неподвижных обмоток, при растяжении — в другую. При этом в рамке наводится переменная э. д. с, амплитуда которой зависит от величины, а фаза — от направления усилия, действующего на датчик. Общий ход рамки ±2,5 мм относительно нейтрального положения.
Регулировка нейтрального положения рамки производится по минимуму сигнала с рамки с помощью винта, который можно ввёртывать или вывёртывать из кронштейна, поворачивая тем самым рамку ИД. регулировочный винт находится под трубчатым кожухом.
На кронштейне рамки ИД закреплены контактные упоры, а на корпусе укреплены две пары контактов с регулировочными винтами. При повороте кронштейна контактные упоры нажимают на ту или другую пластины, размыкая нормально замкнутые контакты. Размыкание каждой пары регулируется с помощью регулировочных винтов.
Пружина воспринимающая усилия, выполнена в виде толстостенного цилиндра с прорезями, нанесёнными по окружности цилиндра в шахматном порядке. Такая конструкция пружины обеспечивает очень малый ход (перемещение).
Поскольку датчик усилий устанавливается на самолёте вместо одной из последних тяг в системе управления рулём высоты, то растяжение или сжатие датчика не должно значительно увеличивать люфт, так как это затрудняет лётчику упрвление самолётом. Максимальный ход пружины —0,25±0,05 мм при воздействии на датчик силы Р=100 кгс (как на сжатие, так и на растяжение). Датчики ДДУ различных модификаций (ДДУ-1, ДДУ-2, ДДУ-5, ДДУ-6) отличаются друг от друга только конструкцией наконечников, при помощи которых датчик соединяется с тягами управления.
- Расчётное усилие на разрыв датчика составляет 2500 кгс.
- Вес ящика 1,75 кг.
Б л о к у п р а в л е н и я т р и м м и р о в а н и е м (БУТ) предназначен для управления работой электромеханизма УТ-15.
В состав блока входят следующие основные узлы:
- фазовый дискриминатор ФД-2007;
- релейный магнитный усилитель 5066Д;
- реле времени РВ-8;
- автомат контроля;
- мост сопротивлений для центровки;
- реле ТКЕ-53ПДТ;
- реле ТКЕ-52ПДТ.
Ф а з о в ы й д и с к р и м и н а т о р ФД-2007 состоит из двух каскадов усиления и фазочувствительного выпрямителя.
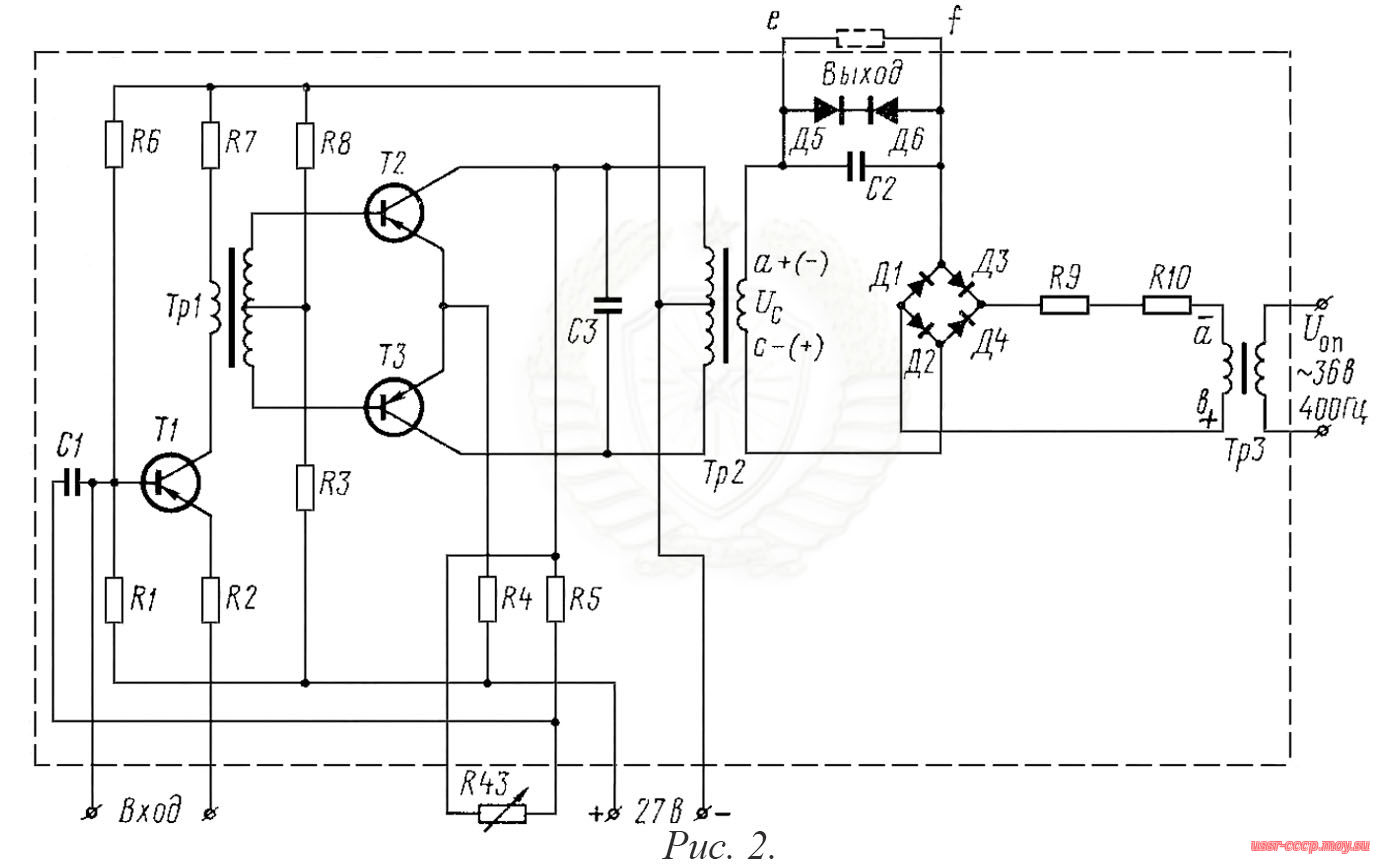
Схема фазового дискриминатора ФД-2007
Первый каскад собран на транзисторе Т1 типа П104 по схеме с общим эмиттером и служит для усиления сигнала по напряжению. Нагрузкой каскада является первичная обмотка трансформатора Тр1. смещение на базу подаётся с делителя напряжения на резисторах R1 и R6. Резистор R7 предназначен для ограничения коллекторного тока.
Второй каскад собран на транзисторах Т2 и Т3 типа П304 по двухтактной схеме и является усилителем мощности с трансформаторном выходом. Смещение на базы Т2 и Т3 подаётся с делителя напряжения на резисторах R3 и R8. Конденсатор С3 предназначен для резонансной настройки контура. С выхода второго каскада на вход первого каскада через параллельно включённые резисторы R5, R43 и конденсатор С1 подаётся напряжение обратной отрицательной связи. С помощью резистора R43 можно регулировать величину обратной связи и, следовательно коэффициент усиления.
Усиленный сигнал с трансформатора Тр2 подаётся на фазочувствительный выпрямитель на диодах Д1, Д2, Д3 и Д4 к которому подводится опорное напряжение 36 В 400 Гц, такой же частоты, как и частота входного сигнала. Опорное напряжение служит для того, чтобы изменять проводимость диодов. При отсутствии входного сигнала ток в нагрузке практически отсутствует. Рассмотрим работу фазочувствительного выпрямителя при различном соотношении фаз опорного напряжения и напряжения входного сигнала.
Предположим, что полярности входного сигнала -- и опорного напряжения ----- будут такими, как указано на (рис. 2). При этом протекает ток по цепи:
- точка d;
- точка e;
- точка
 ; ;
- диод Д3;
- точка a;
- точка в;
- диод Д2;
- точка с.
Напряжение Uс и Uоп складываются.
В следующий полупериод ток протекает по цепи:
- точка с;
- диод Д4;
- точка a;
- точка в;
- диод Д1;
- точка ;
- точка e;
- точка d.
Напряжение Uс и Uоп вычитаются.
Первый ток больше второго, поэтому на нагрузке падение напряжения имеет постоянную составляющую определённой полярности.
Если фаза входного сигнала Uс изменится на 180° (знаки в скобках), то первый ток окажется меньше второго и падение напряжения на нагрузке будет иметь обратную полярность. В качестве нагрузки фазовых дискриминаторов в БК-4 используются управляющие обмотки магнитных усилителей.
Конструктивно фазовый дискриминатор представляет собой смонтированный на текстолитовой плате узел с печатным монтажом. Соединение его с другими элементами осуществляется десятиклеммной колодкой.
М а г н и т н ы й у с и л и т е л ь 5066Д представляет собой двухтактный усилитель с внутренней обратной связью и дополнительной внешней положительной обратной связью, обеспечивающей релейный режим усиления. Предназначен для использования в качестве чувствительного реле, позволяет суммировать сигналы постоянного тока (до четырёх сигналов). Необходимым условием получения скачкообразного изменения выходного параметра магнитного усилителя является наличие на его статической характеристике участка с бесконечной крутизной (dΙН/dΙУ=∞).
Такой участок может быть получен при введении глубокой положительной обратной связи.
Принцип действия релейного магнитного усилителя можно рассмотреть на примере однотактного магнитного усилителя с внутренней положительной обратной связью и выходом на постоянном токе (рис. 3а).

Рис. 3а. Принцип действия магнитного усилителя 5066Д.
Внутренняя положительная обратная связь создаётся за счёт включения в цепь рабочих обмоток W ~ диодов Д3 и Д4. Сама по себе эта связь является недостаточной для получения релейного режима, и характеристика такого усилителя имеет вид, показанный на (рис. 3б).
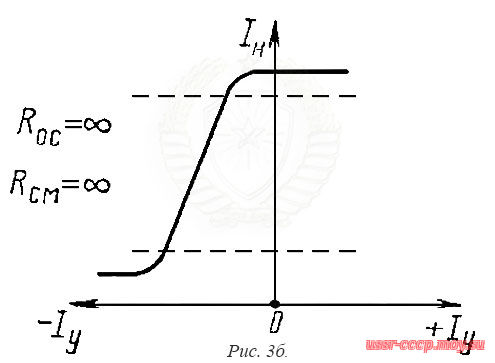
Рис. 3б. Принцип действия магнитного усилителя 5066Д.
Введение дополнительной положительной обратной связи обеспечивает получение релейного режима (рис. 3в).
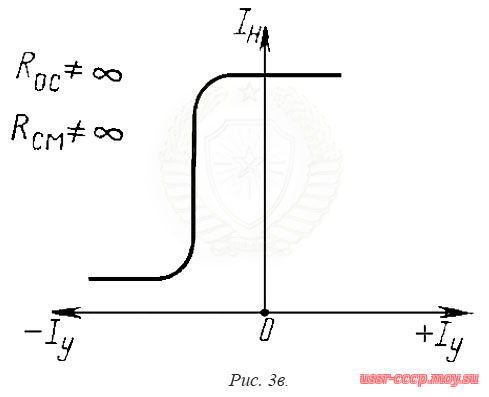
Рис. 3в. Принцип действия магнитного усилителя 5066Д.
Изменяя с помощью обмотки смещения Wсм сопротивление Rсм (рис. 3г), характеристику усилителя можно сдвигать относительно нулевого сигнала и тем самым регулировать величину управляющего тока, при котором происходит срабатывание реле Р.
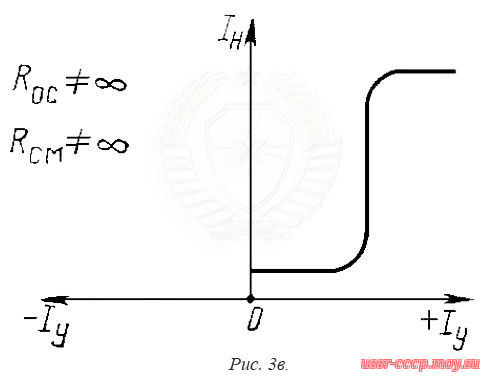
Рис. 3г. Принцип действия магнитного усилителя 5066Д.
Для обеспечения чувствительности к полярности входного сигнала магнитный усилитель 5066Д состоит из двух одноконтактных усилителей, реагирующих на сигналы разной полярности. Характеристика усилителя 5066Д представлена на (рис. 4б).
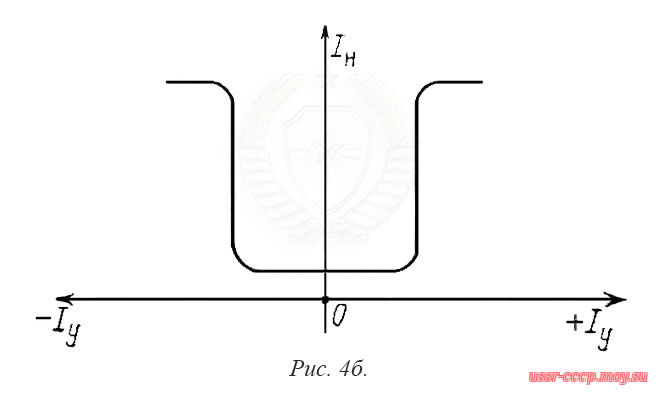
Рис. 4б. Схема и характеристика магнитного усилителя 5066Д.
С помощью резистора 5 обеспечивается одинаковая величина тока срабатывания и отпускания реле при разной полярности входного сигналя (рис. 4а).
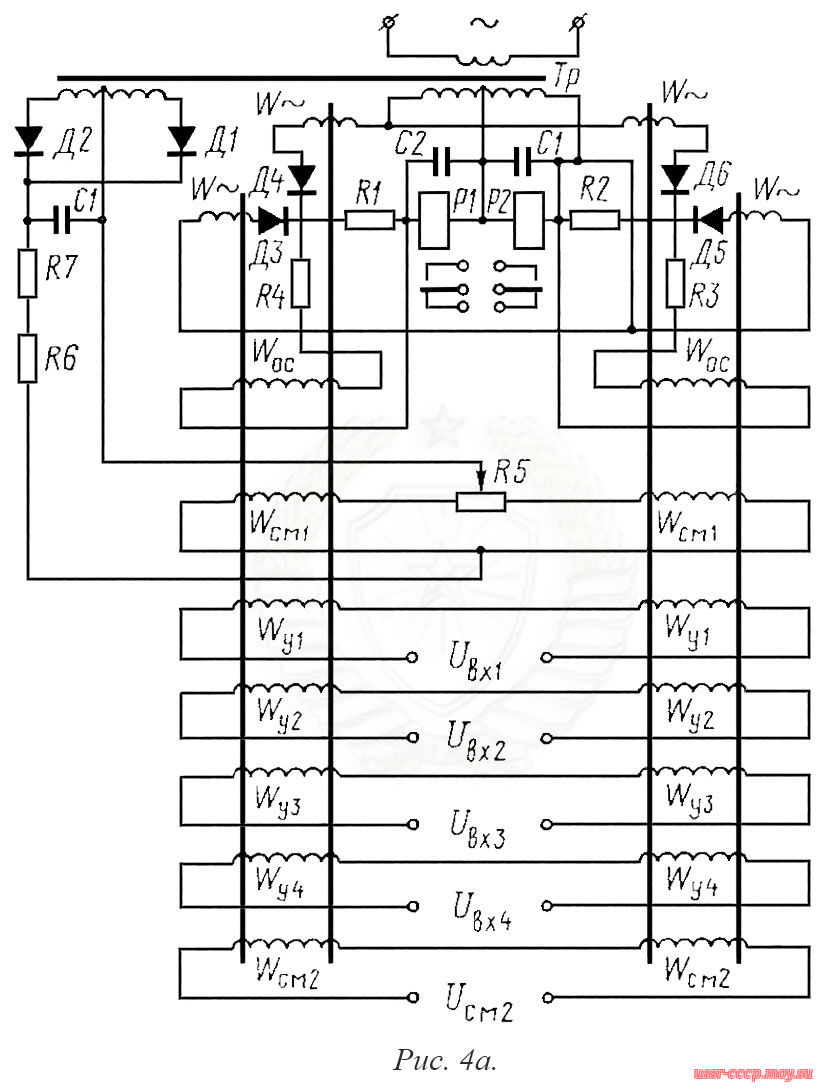
Рис. 4а. Схема и характеристика магнитного усилителя 5066Д.
А в т о м а т к о н т р о л я состоит из двух реле ТКЕ-52ПДТ (Р1, Р2), четырёх реле РЭС-9 (Р3, Р4, Р5, Р6) и двух диодов Д304 (Д1, Д2).
Мост состоит из резисторов R6, R3, R5 и служит для компенсации (в случае необходимости) сигнал с ДДУ.
У к а з а т е л ь а в т о м а т а т р и м м и р о в а н и я (УАТ-3) служит для индикации усилий, возникающих в тягах управления рулём высоты.
Основной частью указателя является логометр типа УМ-47, состоящий из четырёх неподвижных катушек и постоянного магнита, вращающегося в магнитном поле катушек. Магнит помещён внутри медного успокоителя, работающего на принципе возникновения вихревых токов. На оси вращения постоянного магнита укреплена стрелка, которая в нейтральном положении располагается параллельно. Шкала имеет широкую отметку нейтрального положения стрелки и две треугольные отметки.
В нейтральном положении стрелка удерживается за счёт взаимодействия подвижного магнита с другим постоянным магнитом, неподвижно укреплённым на плате логометра. В указателе УАТ-3 логометр электрически включён как гальванометр, т. е. для работы используется только одна пара катушек.
При входном сигнале Uвх=3В за счёт взаимодействия вращающегося магнита с магнитном полем катушек стрелка скачком перемещается на треугольную отметку. При входном сигнале Uвх<3В за счёт взаимодействия неподвижного и вращающегося магнитов стрелка устанавливается в нейтральное положение.
Для настройки указателя по заданному входному сигналу параллельно катушкам логометра подключается резистор 1=150÷1000 Ом.
Логометр закрывается пермаллоевым экраном, который является магнитопроводом для магнитных силовых линий рамок и одновременно защищает подвижную часть прибора от влияния внешних магнитных полей. На передней части прибора устанавливается сигнальная лампочка СМ-37 с красным светофильтром. Вес указателя — 0,25 кг.
Э л е к т р о м е х а н и з м УТ-15 является силовым элементом АТ-2 и служит для отклонения триммера руля высоты.
Электромеханизм состоит из следующих основных узлов:
- электродвигателя постоянного тока Д-10Ф;
- редуктора;
- электромагнитной муфты сцепления (встроенной в редуктор);
- блока концевых выключателей.
Д в и г а т е л ь Д-10Ф — последовательного возбуждения. Направление вращения двигателя изменяется за счёт двух обмоток возбуждения, соединённых последовательно я якорем. Направление вращения вала двигателя зависит от того, на какую обмотку подаётся напряжение +27 В.
Р е д у к т о р э л е к т р о м е х а н и з м а УТ-15 состоит из двух частей, разделённых между собой электромагнитной муфтой сцепления. Первая часть редуктора состоит из трёх пар зубчатых колёс и одной ступени планетарной передачи с общим передаточным отношением ⅈ=127,305. Вторая часть редуктора состоит из двух ступеней планетарной передачи с общим передаточным отношением ⅈ=22,049 и двухступенчатого понижающего редуктора, передающего вращение на ось с кулачками концевых выключателей.
Э л е к т р о м а г н и т н а я ф р и к ц и о н н а я м у ф т а служит для соединения между собой первой и второй частей редуктора.
Она позволяет при отсутствии в ней питания механически управлять триммером. При этом вращение передаётся только на вторую часть редуктора, первая часть редуктора и двигатель Д-10Ф не вращаются.
Электромагнитная муфта имеет две обмотки, каждая из которых соединяется параллельно обмотке возбуждения двигателя. Это обеспечивает передачу момента от двигателя на выходной вал при любом направлении вращения двигателя.
Блок концевых выключателей смонтирован в электромеханизме УТ-15 в виде отдельного узла. Со второй части редуктора вращение передаётся через двухступенчатый понижающий редуктор на ось, на которой укреплены два текстолитовых кулачка концевых выключателей и два текстолитовых кулачка нуль-контакта. При вращении вала вместе с кулачками по ним катится ролик, укреплённый на плоской пружине. Когда выступ кулачка проходит к ролику, пружина с роликом отжимается, нажимая через другую пружину на штырёк микровыключателя. Регулировочным винтом с гайкой можно поджимать или отпускать штырёк микровыключателя, добиваясь тем самым чёткого срабатывания.
Срабатывание концевых выключателей регулируется путём поворота текстолитовых кулачков относительно вала по углу поворота выходного вала УТ-15 в пределах 600±15° в обе стороны от нейтрального положения. О нейтральном положении выходного вала УТ-15 (триммера) сигнализирует нуль-контакт, кулачок которого посажен на тот же вал, что и кулачки концевых выключателей.
(— ~ ∞ «» ÷ ± ±28°,5 > ⅈ t °С ≈ δ ω β R ε φ ξ σ ρ р ∆ γ Ʋ θ ϑ ψ k d Ʀ Ι <
АП-6Е или АП-6ЕМ-ЗП НКП-4 ПП-1ПМ БР-46А ДИД-0,5У У-20Н НАС-1А6к ДГ-0,1ТА
d δz δн γз рϑ рξ рε рψ Rрε Ʀ1 Uвх «Путь-4МПА» «Курс МП» ∆ψ ψз «Глис.» 10 с +27 В 400 Гц,
«» >± °С δ ω ≈ β ε φ ξ σ ρ ∆ γ θƲ ϑ ψ f k)
Материалы
Орлов Г.В. «АТ-2 — Автомат триммирования» (повествование 12.01.2023).
Источник
https://ussr-cccp.moy.su/index/aviacija_sssr/0-10
Источник: https://ussr-cccp.moy.su/index/aviacija_sssr/0-10 | 






















 1
1