Система регистрации режимов полёта МСРП-12-96(-1)-С2 — Библиотека СССР (стр. 98—108 из 112) Система регистрации режимов полёта МСРП-12-96(-1)-С2 — Библиотека СССР (стр. 98—108 из 112)
Статья под цифровой редакцией подготовлена: Орловым Геннадием Викторовичем (08.11.1965) — Советским выдающимся публицистом СССР — Прозаиком СССР — Историком СССР
Страницы: [1—9] [10—14] [15—17б] [17в—26] [26а—33] [33а—46] [38—55] [56—63] [64—79] [80—85] [86-97] [98—108] [109] [110] [111] [112]
98
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
3. Принцип работы
Принцип работы датчика угловых скоростей основан на свойстве гироскопа с двумя степенями свободы совмещать вектор собственного вращения с вектором вынужденного вращения по кратчайшему расстоянию.
На (рис. 11.2) представлена схема двухстепенного гироскопа.
При действии на датчик угловой скорости вектор которой совмещен с вектором кинетического момента Н, возникает гироскопический момент М, равный векторному произведению НХω. Величина гироскопического момента прямо пропорциональна угловой скорости вынужденного вращения, так как кинетический момент гироскопа остается постоянным.
Составляющие гироскопического момента по осям х, у, z равны векторному произведению кинетического момента на соответствующую составляющую вектора угловой скорости
Мх=Н·ωу; Мy=Н·ωx; Мz=Н·ωz.
Составляющая ωz не вызывает появления гироскопического момента, так как направления векторов Н и ωz совпадают. Гироскопический момент Мy, уравновешивается реакциями опор.
Гироскопический момент Мх вызывает вращение рамки гироскопа вокруг оси х.
Следовательно, двухстепенный гироскоп реагирует только на угловую скорость Мпр, вектор которой перпендикулярен оси вращения рамки и вектору кинетического момента Н гироскопа.
Вращению рамки вокруг оси к противодействует пружина, которая создает момент Мпр, пропорциональный углу отклонения рамки. Когда противодействующий момент пружины станет равным гироскопическому, вращение рамки прекратится.
Так как угол поворота рамки прямо пропорционален гироскопическому моменту Мх, а гироскопический момент пропорционален угловой скорости, то угол поворота рамки пропорционален угловой скорости летательного аппарата ωу вокруг оси у.
На (рис. 11.2) представлена электрокинематическая схема датчика типа ДУСУ, поясняющая работу датчика. Под действием гироскопического момента Мх гироузел, состоящий из гиромотора 1 и рамки 2, поворачивается вокруг оси подвеса.
Поворот гироузла передается через кинетическую пару палец 3 — сухарь 4 на щетку 6.
Перемещение щеток по обмотке потенциометра 5 пропорционально изменению угловой скорости вращения летательного аппарата.
Угловая скорость летательного аппарата измеряется как величина, пропорциональная напряжению потенциометра между средней точкой и щеткой, или как величина относительного сопротивления потенциометра между щеткой и контактом потенциометра.
При отсутствии угловой скорости вращения датчика вокруг измерительной оси гиро-
скопический момент равен нулю. Щетка 6 удерживается двумя пружинами 7 в среднем положении на обмотке потенциометра 5. При
этом величина выходного напряжения равна нулю, а выходное относительное сопротивление равно 50% от полного сопротивления потенциометра.
При вращении датчика против часовой стрелки, если смотреть на него со стороны знака  , со скоростью, равной диапазону измерения, гироскопический момент уравновешивается пружинами, когда щетка дойдет по обмотке потенциометра до положения . Величина выходного напряжения равна 50% напряжения питания потенциометра, а выходное относительное сопротивление равно 100% от полного сопротивления потенциометра. , со скоростью, равной диапазону измерения, гироскопический момент уравновешивается пружинами, когда щетка дойдет по обмотке потенциометра до положения . Величина выходного напряжения равна 50% напряжения питания потенциометра, а выходное относительное сопротивление равно 100% от полного сопротивления потенциометра.
При вращении датчика по часовой стрелке со скоростью, равной диапазону измерения, гироскопический момент уравновешивается пружинами, когда щетка дойдет по обмотке потенциометра до положения 1. Выходное напряжение при этом равно 50% напряжения питания потенциометра, а относительное сопротивление равно нулю.
При промежуточных значениях угловых скоростей выходное напряжение и относительное сопротивление пропорциональны величине угловой скорости летательного аппарата вокруг оси у.
Для проверки функционирования датчика предусмотрен моментный датчик, который позволяет поворачивать гироузел при отсутствии угловой скорости вокруг измерительной оси.
Моментный датчик представляет собой постоянный магнит 10, посаженный на ось гироузла. Катушка 11 закреплена неподвижно к корпусу.
При пропускании постоянного тока через катушку в ней возникает магнитное поле, под действием которого магнит и вместе с ним гироузел поворачивается на некоторый угол.
99
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
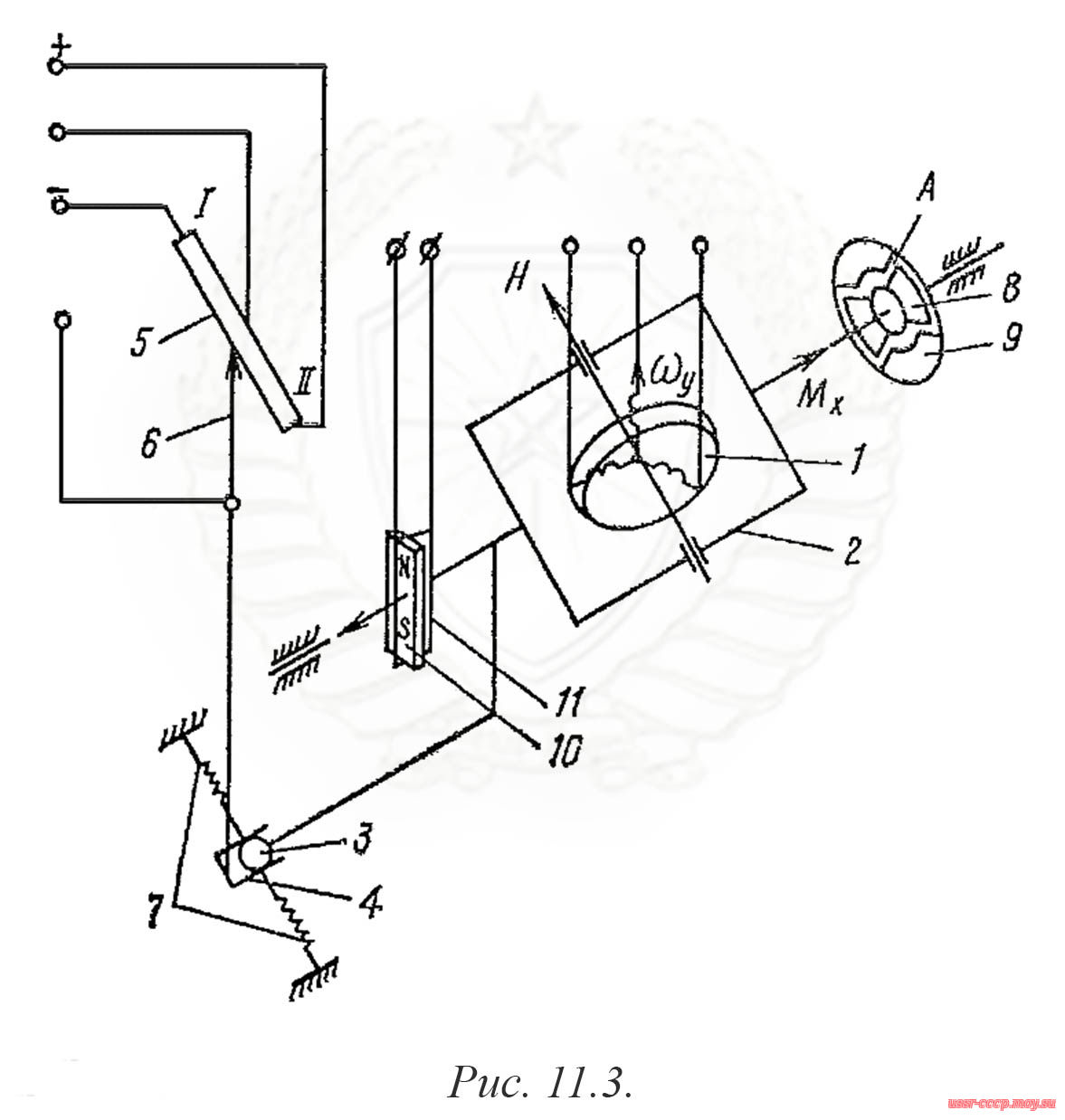
Рис. 11.3. Схема электрокинематическая датчика угловой скорости ДУСУ-1-30АС.
1—гиромотор; 2—рамка; 3—палец; 4—сухарь; 5—потенциометр;6—щётка; 7—прукина; 8—лопатка ротора демпфера; 9—лопатка статора демпфера; 10—магнит; 11—катушка.
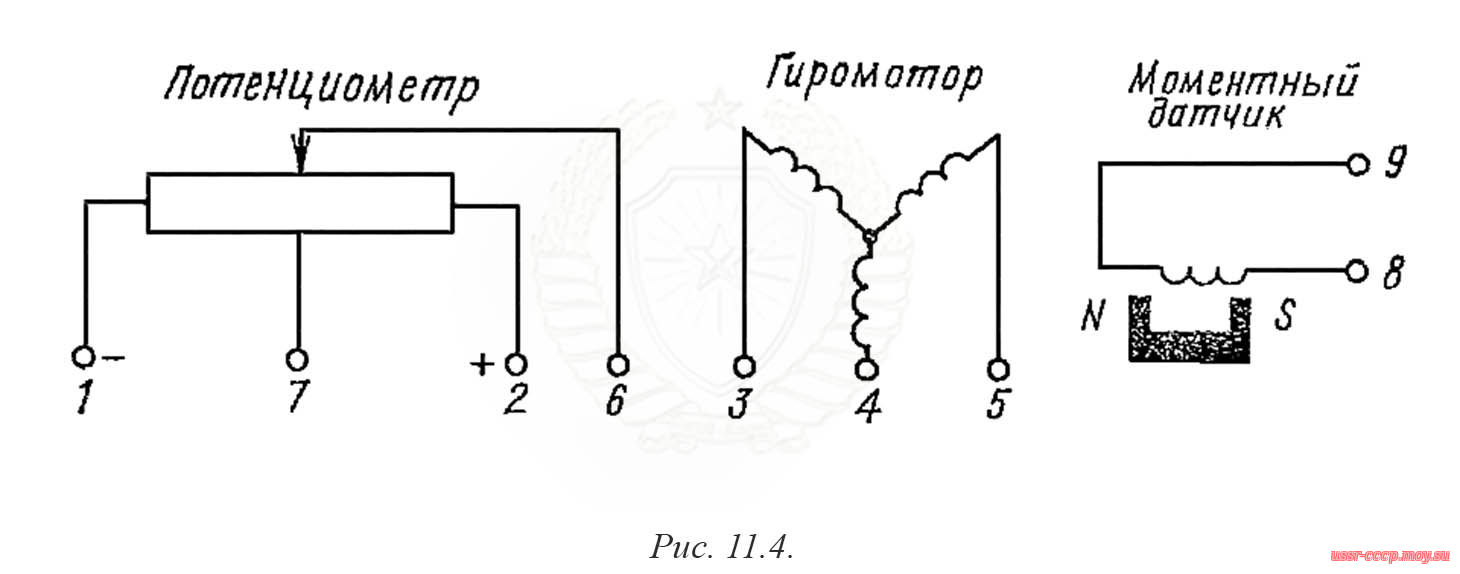
Рис. 11.4. Схема электрическая датчика угловой скорости ДУСУ-1-30АС.
100
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
При изменении угловой скорости вращения летательного аппарата гироузел из одного положения переходит в другое. Благодаря упругости пружин гироузел не сразу устанавливается в новом положении, а начинает колебаться. Эти колебания передаются на щётку и снимаются с прибора, как колебания выходного сигнала.
Для успокоения колебаний гироузел в датчике применён жидкостный демпфер А, в котором энергия колебаний гасится при перемещении жидкости лопатками 8 ротора.
4. Подготовка датчика к работе после установки на летательном аппарате
1. Подсоединить вилку с выводами от потенциометра датчика к распределительному щитку системы МСРП-12-96.
2. Включить бортсеть.
3. Проверить работоспособность датчика с помощью установки УП-МСРП, наблюдая на цифровом индикаторе поверочной установки изменение длительности импульсов кодирующей ячейки (канала), на вход которой подаётся сигнал с датчика, при изменении угловой скорости вращения от 0 до ±30 град./с.
ПРИЛОЖЕНИЕ 12
КРАТКОЕ ОПИСАНИЕ РАСПРЕДЕЛИТЕЛЕЙ СИГНАЛОВ РСАГ 1186А И РСАГ 1186Б
1. Назначение
Распределитель сигналов (рис. 12.1) является силовым повторителем сигналов крена и тангажа самолёта, выдаваемых гироскопическим датчикам дистанционного авиагоризонта АГД-1, и предназначен для одновременной выдачи этих сигналов, разных или одинаковых по характеристикам, нескольким потребителям на самолёте.
2. Основные технические данные
Напряжение питания:
переменного тока — 36±2 В частотой 400±8 Гц;
постоянного тока — 27±2,7 В.
Потребляемые токи:
переменный ток напряжением 36 В частотой 400 Гц — не более 0,7 А в фазе;
постоянный ток напряжением 27 В — не более 0,5 А.
Погрешность дистанционной передачи углов крена и тангажа с гироскопического датчика АГД-1 на выходные оси распределителя:
на 0° не более ±0,5°;
до 30° — не более ±1°;
свыше 30° — не более ±1,5°.
Чувствительность распределителя сигналов (минимальный угол поворота гироскопического датчика АГД-1, при котором начинается перемещение осей распределителя) — не более ±10 угловых минут.
Добротность отработок канала крена и тангажа распределителя сигналов (скорость отработки на градус рассогласования) 50 град./сек на градус.
Скорость отработки углов рассогласования тангажа и крена при нормальной температуре и при полном сигнале не менее 360 град./с. в
Масса распределителя сигналов — 5 кг.
3. Принцип работы
Передача показаний по крену и тангажу осуществляется двумя одинаковыми следящими системами крена и тангажа, которые воспроизводят соответственно углы крена и тангажа, замеряемого гиродатчиком АГД-1.
Для выдачи сигналов крена и тангажа в распределителе сигналов используются потенциометры и сельсины датчики:
в варианте 1186Б — два блока потенциометров;
в варианте 1186А — один блок потенциометров и один сельсин-датчик,
(этим распределитель сигналов 1186Б отличается от 1186А).
Датчиками сигналов крена и тангажа для автопилотов АП-28Ж1, АП-282Ж1Б являются потенциометры с сопротивлением 1730±110 Ом.
Сельсины-датчики следящей системы крена и тангажа установлены на соответствующих рамах гиродатчика АГД-1.
Сельсины-приёмники крена и тангажа расположены в распределителе сигналов.
При отклонении самолёта относительно поперечной или продольной осей происходит рассогласование между сельсином-датчиком гиродатчика и соответствующим сельсином-приёмником распределителя. Сигнал рассогласования усиливается полупроводниковым усилителем и попадает на обмотку управления двигателя генератора ДГ-1, который через редуктор передает вращение ротору сельсина-датчика, приводя его в положение, соответствующее положению ротора сельсина гиродатчика АГД-1.
100а
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
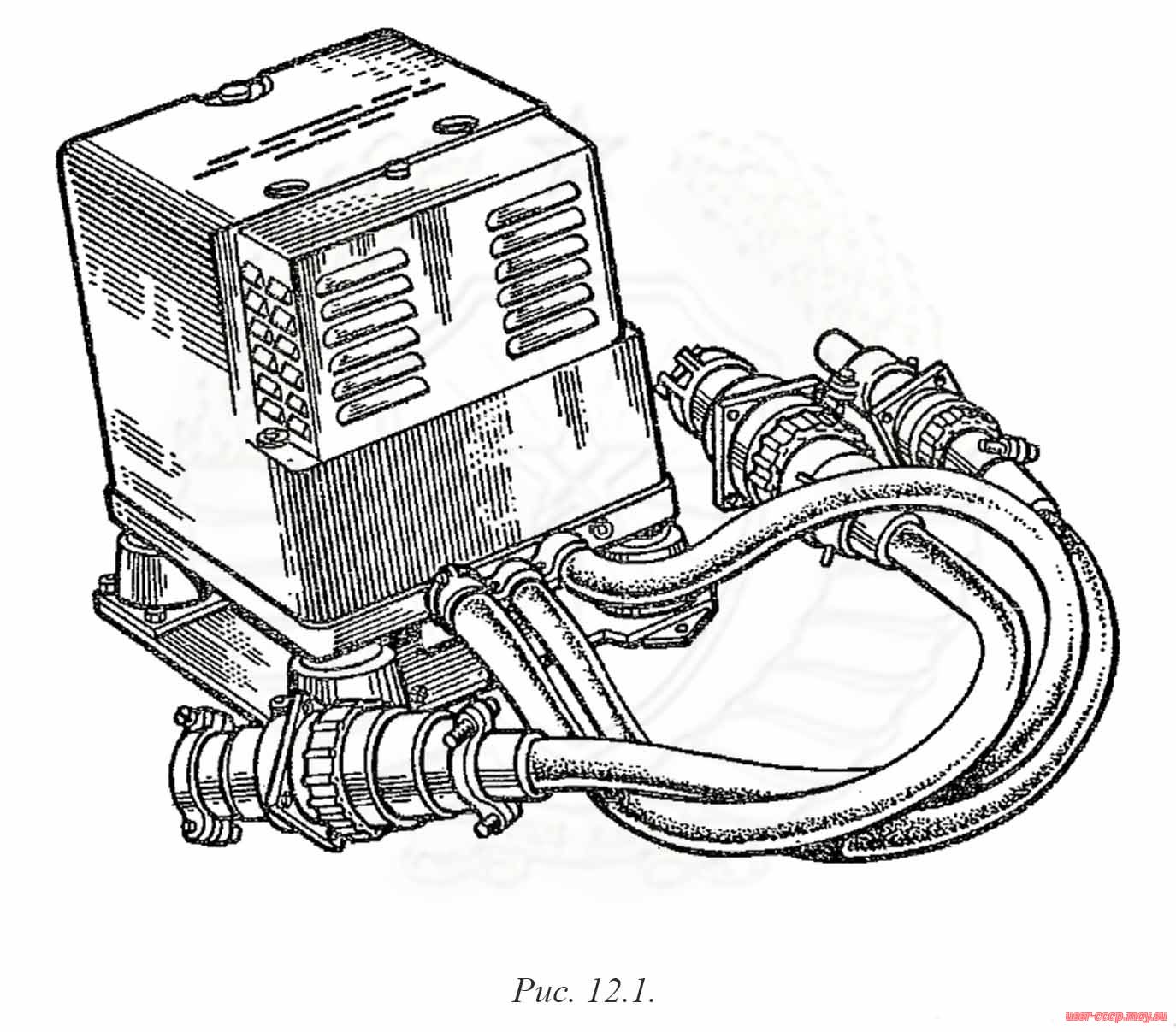
Рис. 12.1. Распределитель сигналов РСАГ-1186А (РСГА-1186Б).
101
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
При обработке ротора сельсина-приёмника тангажа или крена его движение с помощью безлюфтного зубчатого зацепления передаётся щёткам потенциометров и ротору сельсина-датчика распределителю сигналов.
Таким образом, распределитель сигналов воспроизводит углы тангажа и крена самолета и выдаёт с потенциометров и сельсинов-датчиков сигналы, зависящие от углов тангажа и крена самолета.
Для улучшения динамических характеристик следящей системы сигнал двигателя-генератора ДГ-1 в качестве отрицательной обратной связи попадает на вход усилителя, где суммируется с напряжением ротора сельсина-датчика.
В следящей системе тангажа предусмотрено реле коммутации, которые срабатывают по сигналу коммутатора гиродатчика АГД-1 при перевернутом положении следящей рамы гиродатчика (см. описание АГД-1) и своими контактами переключает обмотку ротора сельсина-приёмника тангажа. Этим обеспечивается правильная обработка следящей системы тангажа при любом положении следящей рамы гиродатчика АГД-1.
В каждом канале предусмотрены концевые выключатели, которые механически связаны с осью сельсина-приёмника тангажа или крена и срабатывают при повороте ротора в любую сторону на угол 76,5±3°.
Для обеспечения проверки работоспособности следящих систем крена и тангажа в каждом канале распределителя предусмотрен трансформатор, вторичная обмотка которого включена последовательно с обмотками ротора сельсина-приёмника и двигателя-генератора ДГ-1.
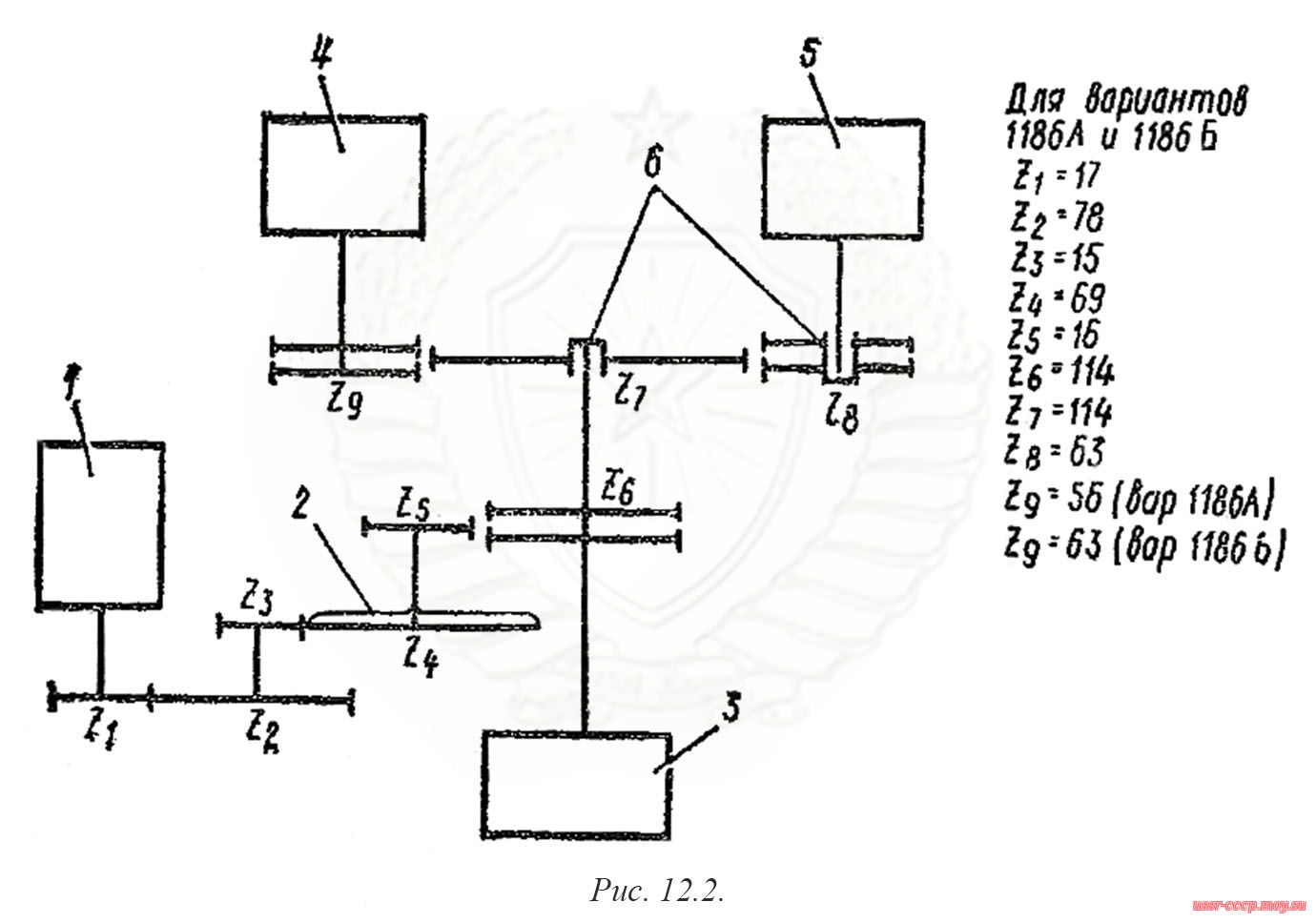
Рис. 12.2. Кинематическая схема распределителя сигналов РСАГ-1186А.
1—двигатель-генератор; 2—муфта проскальзывания; 3—сельсин-приёмник; 4—потенциометрические блоки для варианта 1186Б (сельсин-датчик для варианта, 1186А); 5—потенциометрический блок (для обои вариантов);6—пушечный зажим.
Для проверки работоспособности на первичную обмотку подаётся напряжение переменного тока 36 В частотой 400 Гц. Сигнал со вторичной обмотки попадает на вход усилителя. С выхода усилителя напряжение подаётся на обмотку управления двигателя-генератора ДГ-1, который через редуктор отрабатывает ротор сельсина-приёмника, что свидетельствует о работоспособности следящей системы распределителя сигналов.
102
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
4. Подключение распределителя сигналов к гиродатчику АГД-1, источникам питания и потребителям сигналов
У распределителя предусмотрено три штепсельных разъёма:
- штепсельный разъём Д — для подключения распределителя сигналов к гиродатчику и источникам питания;
- штепсельный разъём Ж — для подключения потребителей по каналу крена;
- штепсельный разъём Ц — для подключения потребителей по каналу тангажа.
На штырьки этих штепсельных разъёмов выведены:
— сигналы сельсинов-датчиков крена и тангажа гиродатчика;
— цепи концевых выключателей;
— первичные обмотки трансформаторов, предназначенных для проверки работоспособности каналов крена и тангажа;
— питание потенциометров крена и тангажа;
— средние точки и щетки потенциометров крена и тангажа;
— роторные и статорные концы сельсинов-датчиков крена и тангажа;
— сигнал коммутации, снимаемый с гиродатчика (штыри 32 разъема «Ц»).
ПРИЛОЖЕНИЕ 13
КРАТКОЕ ОПИСАНИЕ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА БР-40
1. Назначение
Распределительный блок БР-40 (рис. 13.1) служит для выдачи сигналов курса постоянного и переменного тока в диапазоне от 0 до 360° и предназначен для работы на летательных аппаратах с курсовыми системами КСИ, КС, ГМК, ТКС-П и системой курсовертикали СКВ-2Н.
Кроме того, блок может быть использован в качестве повторителя угловых положений различных датчиков в сельсинных дистанционных передачах. Количество сельсинов-приёмников типа 573, подсоединяемых к сельсину-датчику блока, должно быть не более семи (сельсины-приёмники должны работать в режиме слежения за сельсином-датчиком).
2. Основные технические данные
Питание — 3~400 Гц, 36 В±5% и 2—27 В +10%.
Напряжение питания выходных потенциометров — 6,3 В постоянного тока от блока
питания БП-7.
Температурный интервал — от -60 до +60 °С.
Потребляемая мощность:
по постоянному току — более 35 Вт;
по переменному току — не более 30 ВА.
Погрешность блока по шкале — не более ±2°.
Погрешность сельсина-датчика при температурах от -60 до +60°С — не более ±45.
Погрешность выходных линейных потенциометров:
при температуре +20°С — не более ±1°; при температурах от -60 до +60°С — не более ±2°.
Сопротивление линейных потенциометров — 4 кОм.
Время готовности блока к работе с момента включения курсовой системы — не более 2 мин.
Масса — не более 2 кг.
3. Описание работы распределительного блока по блок-схеме
Передача показаний по курсу от курсовых систем блоку БР-40 осуществляется следующим образом: статор сельсина-приёмника М1 подключается к ротору дифференциального сельсина механизма согласования курсовой системы или к сельсину-датчику курса курсовой системы. При рассогласовании между сельсином-датчиком курсовой системы и сельсином-приёмником блока БР-40 с ротора сельсина приёмника М1 сигнал рассогласования в виде переменного тока подаётся на вход усилителя У1. С выхода усилителя усиленный сигнал поступает на управляющую обмотку двигателя М3, который через редуктор вращает ротор сельсина-приёмника до согласованного положения, соответствующего курсу самолёта.
103
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
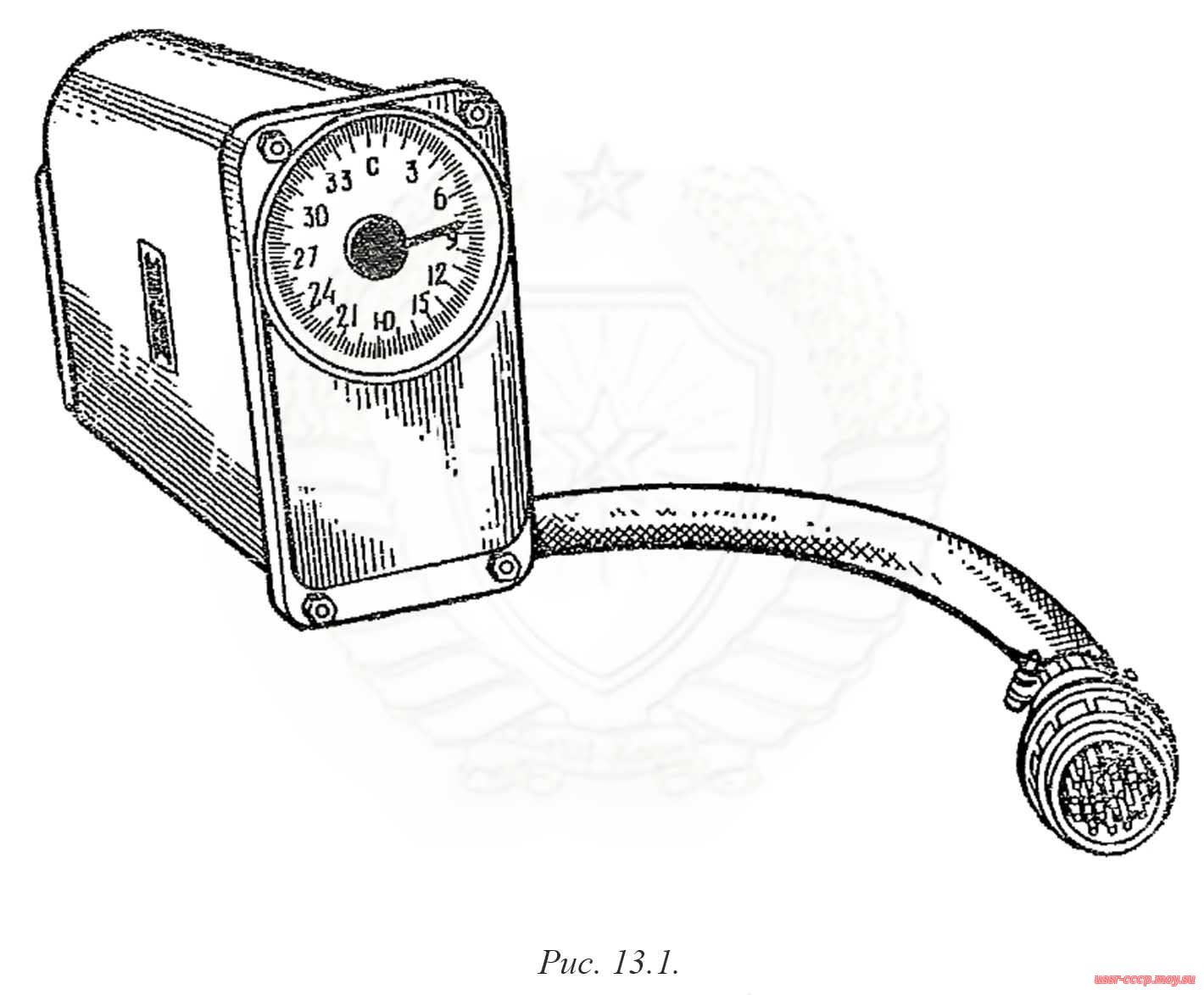
Рис. 13.1. Распределительный блок БР-40.
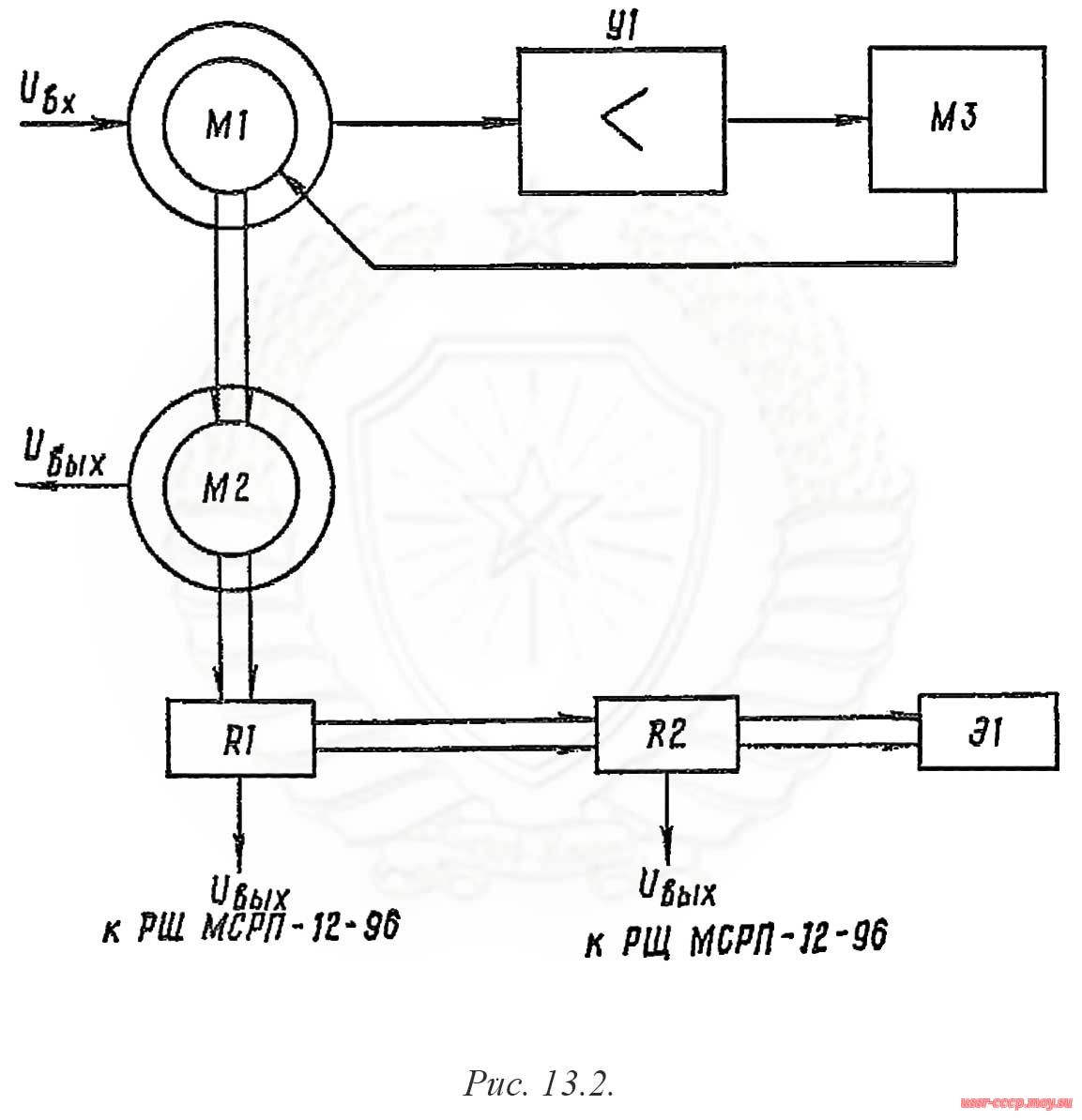
Рис. 13.2. Блок-схема распределительного блока БР-40.
104
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
На одной оси с ротором сельсина-приёмника жестко укрепляется ротор сельсина-датчика М2, потенциометр R1, щётки потенциометра R2 и щётки коллектора Э1.
Статор сельсина-датчика, потенциометр R2 с коллектором Э1 и щетки потенциометра R1 закреплены на корпусе блока соосно с осью блока.
При отработке ротора сельсина-приёмника М1 его движение передаётся ротору сельсина-датчика М2, потенциометру R1, щёткам потенциометра R2 и щётке коллектора Э1, которые воспроизводят углы курса самолёта, в результате чего со статора сельсина-датчика М2 (если ротор запитан переменным напряжением и с потенциометров R1 и R2 снимаются электрические сигналы переменного и постоянного тока, пропорциональные курсу.
ПРИЛОЖЕНИЕ 14
КРАТКОЕ ОПИСАНИЕ ПРЕОБРАЗОВАТЕЛЯ ОБОРОТОВ ПО-15
1. Назначение
Преобразователь оборотов ПО-15 (рис. 14.1) служит для преобразования напряжения датчика типа ДТЭ, частота которого пропорциональна оборотам авиадвигателя, в постоянное напряжение.
2. Основные технические данные
Диапазон изменения выходного напряжения при измерении оборотов от 10 до 110% соответственно — от 0,4 до 6 В.
Температурный интервал — от -60 до+60 °С.
Погрешность — не более ±2,5%.
Питание — сеть постоянного тока напряжением от 20 до 30 В.
Потребляемая мощность — не более 2,5 Вт.
Масса — не более 2,5 кг.
3. Принцип работы
Преобразователь оборотов ПО-15 преобразует частоту входного напряжения от датчика оборотов в прямоугольные импульсы стабильной длительности и амплитуды и выделяет среднее значение импульсного напряжения, пропорциональное оборотам авиадвигателя.
Работа ПО-15 происходит следующим образом. Напряжение от датчика оборотов поступает на вход транзисторного умножителя частоты, формирующего прямоугольные импульсы напряжения, частота следования которых в 2 раза выше частоты входного напряжения.
Импульсы напряжения удвоенной частоты усиливаются усилителем-ограничителем и дифференцируются. Продифференцированные отрицательные импульсы запускают ждущий мультивибратор, который формирует прямоугольные импульсы напряжения стабильной длительности.
Импульсы напряжения ждущего мультивибратора после усиления усилителем, работающим в режиме переключения, поступают на вход трехзвенного ГС-фильтра. На выходе фильтра выделяется среднее значение прямоугольного импульсного напряжения, величина которого пропорциональна частоте следования импульсов, т. е. частоте входного напряжения.
Для уменьшения влияния изменения напряжения питания на работу схемы и для стабилизации амплитуды прямоугольных импульсов используется стабилизатор напряжения.
4. Подготовка к работе после установки на летательном аппарате
При подготовке преобразователя оборотов к работе необходимо:
— подсоединить преобразователь к датчику типа ДТЭ, распределительному щитку системы МСРП-12-96 и источнику питания согласно схеме внешних соединений (см. рис. 14.3);
— включить бортсеть.
Проверить работоспособность ПО-15 с помощью УП-МСРП, наблюдая на цифровом индикаторе поверочной установки изменение длительности импульсов кодирующей ячейки, на вход которой подаётся сигнал с ПО-15, при изменении числа оборотов авиадвигателя от 0 до 110%.
105
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
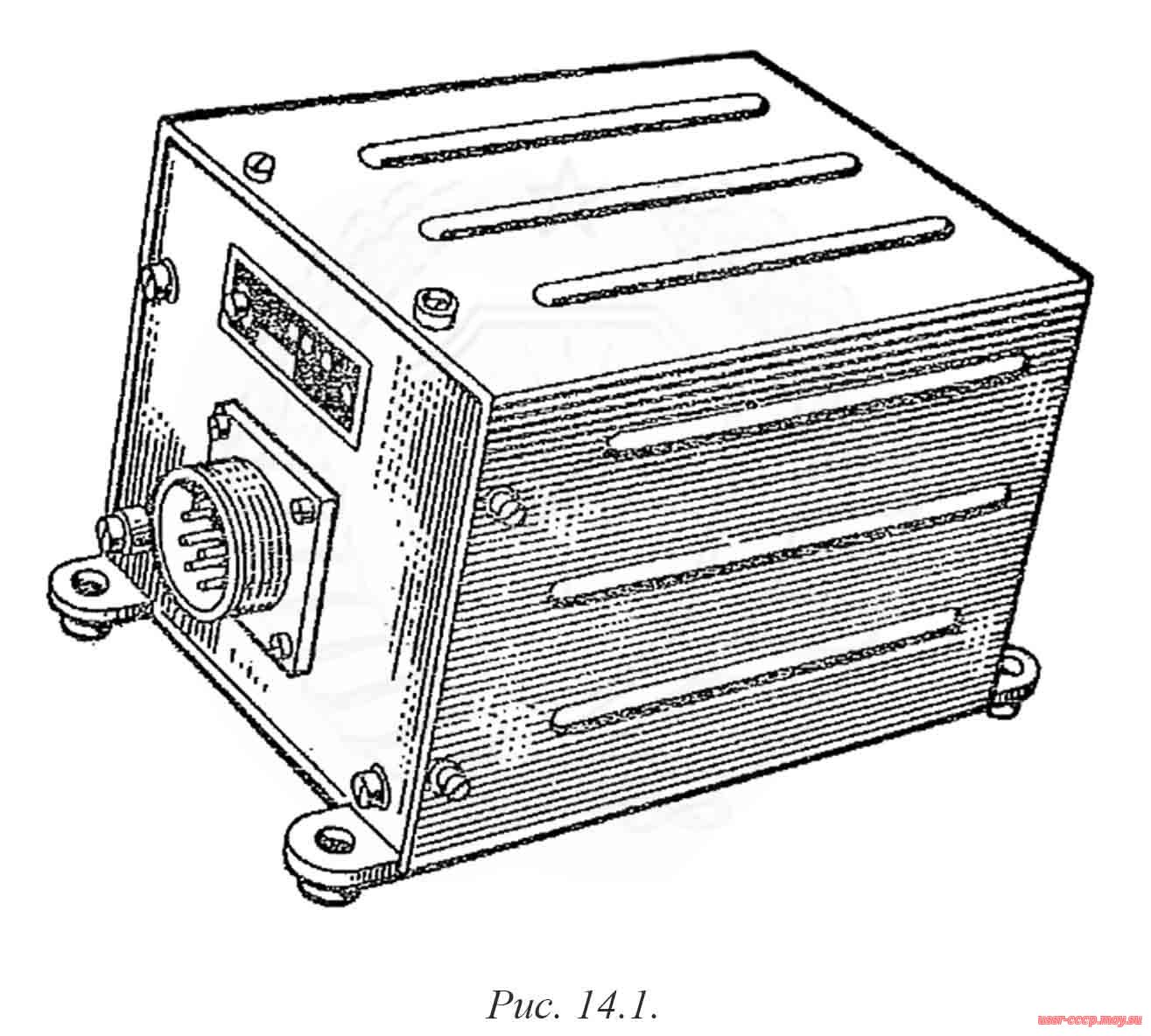
Рис. 14.1. Преобразователь оборотов ПО-15.
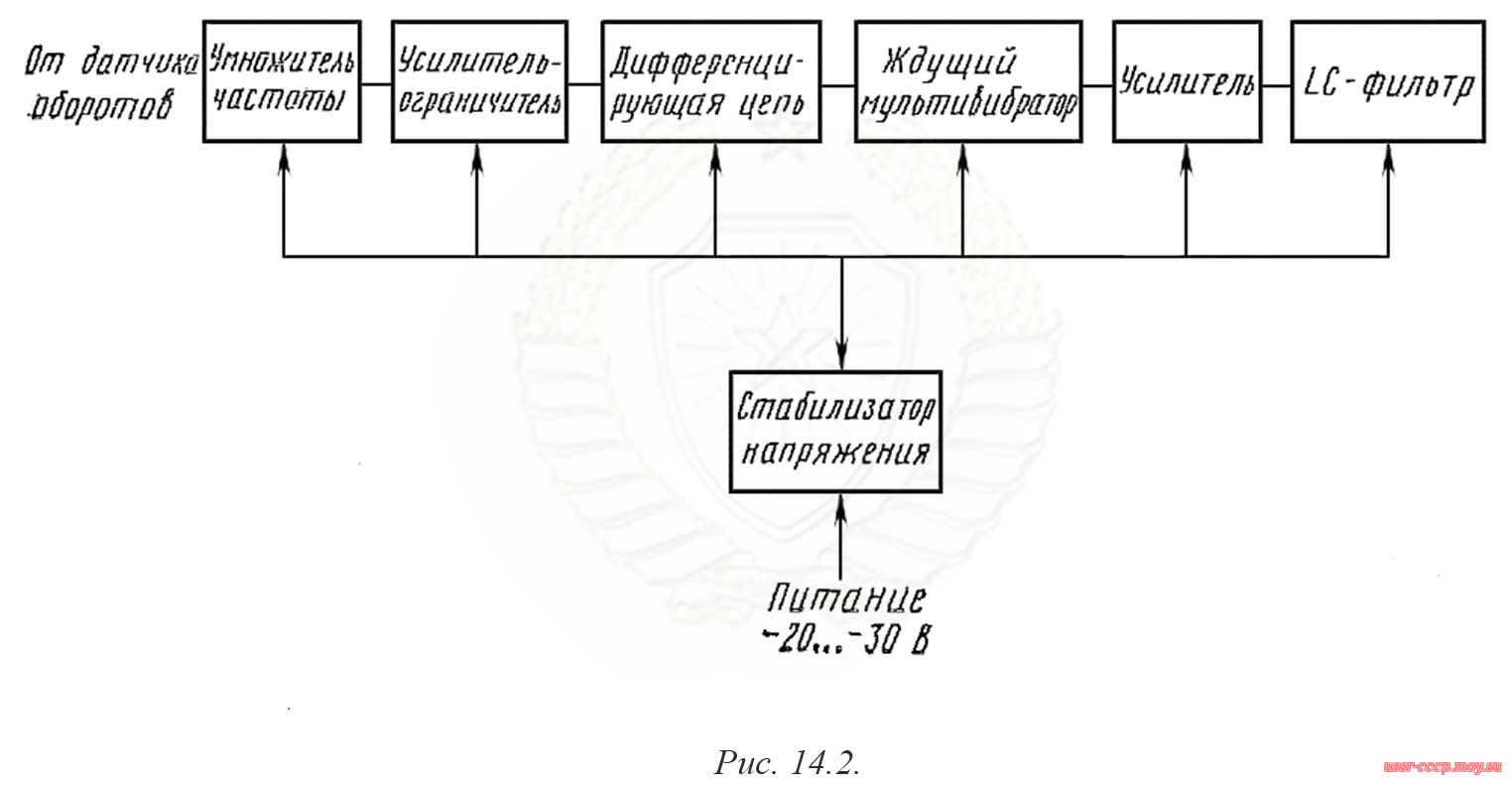
Рис. 14.2. Блок-схема преобразователя оборотов ПО-15.
106
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
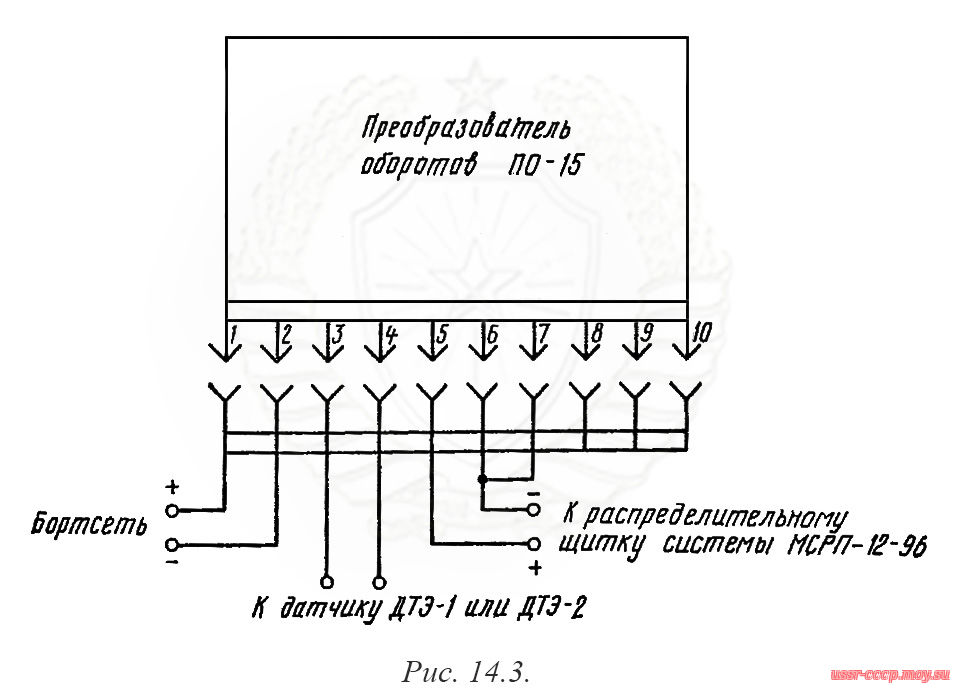
Рис. 14.3. Схема внешних соединений преобразователя оборотов ПО-15.
ПРИЛОЖЕНИЕ 15
КРАТКОЕ ОПИСАНИЕ СИГНАЛИЗАТОРА СКОРОСТНОГО НАПОРА ССА-0,27±2,2И
1. Назначение
Сигнализатор скоростного напора ССА-0,27±2,2И (рис 15.1) предназначен для включения системы МСРП-12-96 при достижении величины приборной скорости, выставленной по шкале прибора.
2. Основные технические данные
Сигнализатор замыкает электрическую сеть при достижении величины приборной скорости, выставленной по шкале прибора.
Рабочий диапазон скоростей — от 70 до 220 км/час. температурный интервал — от +60 до
-60°С.
Токовая нагрузка сигнализатора при питании постоянным током напряжения 27 В ±10% — не более 0,3 А.
Масса — не более 1 кг.
3. Принцип работы
Работа сигнализатора основана на функциональной зависимости между измеряемым динамическим давлением и упругими деформациями чувствительного элемента.
Полное давление Рп поступает через штуцер полного давления 1·(Д) в полость чувствительного элемента. Через штуцер статического давления 9 (С) в корпус сигнализатора поступает статическое давление Рст и на чувствительный элемент будет действовать разность между полным и статическим давлением — динамическое давление:
Рдпи=Рп—Рст.
Под действием возрастающего динамического давления центр 3 мембраны 2 перемещается, давит на нижнюю пружину 4, несущую контакт 5, до замыкания с контактом 6, укрепленным на верхней пружине.
При спаде динамического давления центр 3 мембраны 2 перемещается и освобождает нижнюю пружину 4, несущую контакт 5, размыкая контакты 5 и 6.
Межконтактное расстояние, соответствующее заданной скорости, выставляется установочным винтом 8, опирающимся на верхнюю пружину 7.
В электрическую схему (рис. 15.3) сигнализатора входят: контактная группа Е и искрогасящий контур, состоящий из ёмкости С и сопротивления R.
107
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Рис. 15.1. Сигнализатор скоростного напора ССА-0,27...2,2И
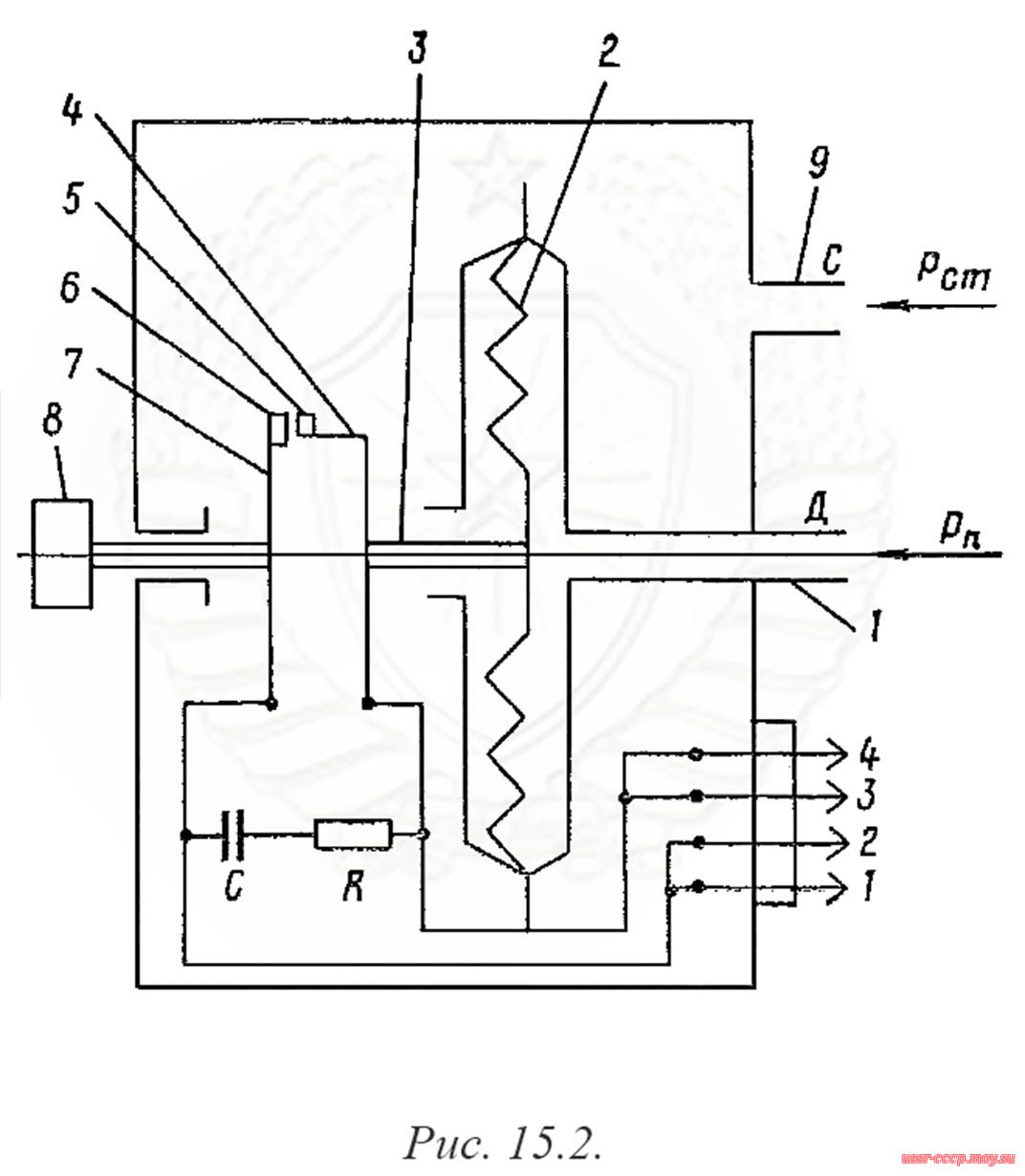
Рис. 15.2. Схема принципиальная сигнализатора скоростного напора ССА-0,27...2,2И.
1—штуцер Д полного давления; 2—мембрана; 3—центр; 4—нижняя пружина; 5 и 6—контакт; 7—верхняя пружина; 8—установочный винт; 9—штуцер С статического давления.
108
СИСТЕМА РЕГИСТРАЦИИ РЕЖИМОВ ПОЛЁТА МСРП-12-96(-1)-С2 РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
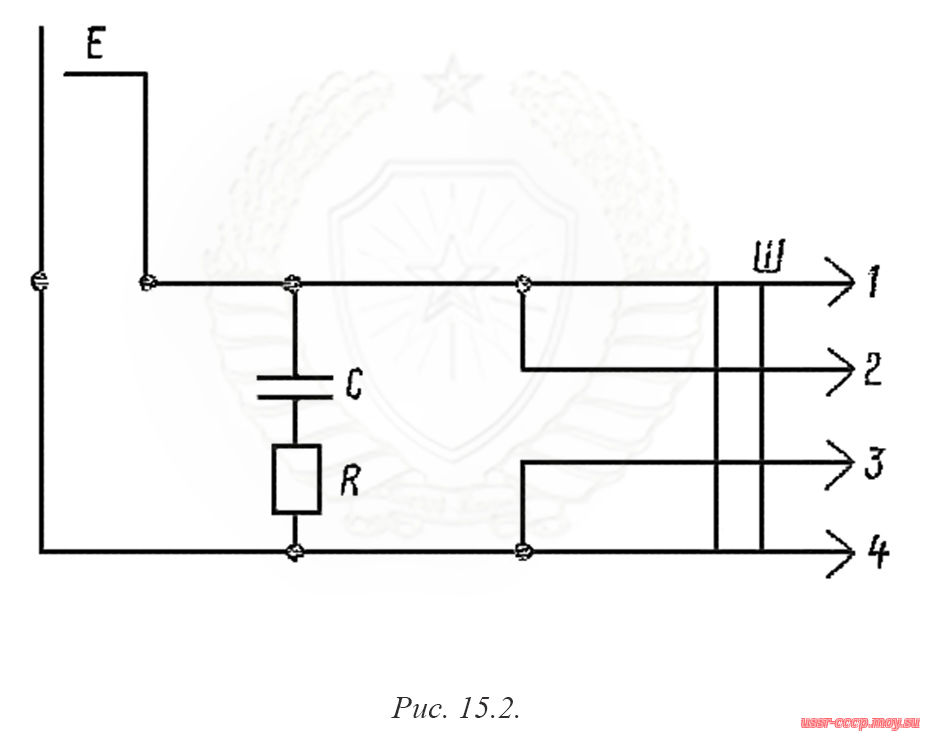
Рис. 15.3. Схема электрическая принципиальная сигнализатора скоростного напора ССА-0,27...2,2И
Е.—контактная группа; С.—конденсатор 0,5 мкф; Ш.—штепсельный разъём; R.—резистор 270 Ом.
[86-97] <<< [98—108] >>> [109]
Источник: https://ussr-cccp.moy.su/index/biblioteka_sssr/0-19 |