РСБН-2 — Радиотехническая система ближней навигации (стр.-2 (Использование РСБН-2 для захода на посадку)) РСБН-2 — Радиотехническая система ближней навигации (стр.-2 (Использование РСБН-2 для захода на посадку))
Статья под цифровой редакцией подготовлена: Орловым Геннадием Викторовичем (08.11.1965) — Советским выдающимся публицистом СССР — Прозаиком СССР — Историком СССР
Страницы [01] [02]
Выполнение полёта в режиме «СРП».
Режим «СРП» применяется в том случае, когда ЛЗП не совпадает ни с линией азимута, ни с орбитой, т. е. когда радиомаяк расположен в стороне от прямолинейного участка маршрута. Наиболее часто этот режим применяется при выполнении полётов по трассам. Работа системы в этом режиме обеспечивается счётно-решающим прибором.
При подготовке к полёту с использованием РСБН-2 в режиме «СРП» необходимо:
1. Определить ЗИПУ участка маршрута относительно истинного меридиана радиомаяка (рис. 7).
2. Определить угол цели — азимут КПМ, ППМ или опорной точки (опорной называется точка пересечения линии траверза радиомаяка с ЛЗП или ее продолжением).
3. Определить расстояние до цели (дальность от радиомаяка до КПМ, ППМ или до опорной точки).
Пилотирование самолёта в режиме «СРП» осуществляется с помощью КППМ, но несколько с меньшей точностью, чем в режиме «Азимут» или «Орбита». При пилотировании самолёта по вертикальной стрелке прибора КППМ в режиме «СРП» боковое уклонение может достигать ±3 км. Точность самолётовождения в режиме «СРП» во многом зависит от точности измерения на карте и установки на блоке управления СРП исходных данных для участков маршрута. Поэтому заданный истинный путевой угол, азимут и дальность конечного (поворотного) пункта маршрута или опорной точки следует определять с большой точностью по крупномасштабной карте или рассчитывать по специальным формулам.
При полёте по маршруту в СРП поступают текущие координаты самолёта, измеряемые системой, и исходные величины, установленные на блоке управления счетно-решающего прибора. В результате сопоставления этих величин в СРП вырабатывается сигнал, который поступает на КППМ. Показания вертикальной стрелки КППМ аналогичны показаниям при полёте по азимуту или орбите.
Для выполнения полёта по маршруту в режиме «СРП» необходимо:
1. Включить и подготовить к работе самолётное оборудование системы.
2. Установить на блоке управления СРП:
- а) ручкой «ЗПУ» величину ЗИПУ участка маршрута, отсчитанную от истинного меридиана, проходящего через наземный радиомаяк;
- б) ручкой «Угол цели» азимут конечного (поворотного) пункта маршрута или опорной точки;
- в) ручкой «расстояние до цели» дальность от радиомаяка до конечного (поворотного) пункта или до опорной точки.
3. Установить на щитке управления штурмана:
- а) канал работы радиомаяка;
- б) переключатель рода работы в положение «СРП»;
- в) ручками «Азимут» и «Орбита» азимут и дальность того пункта маршрута, пролёт которого намечено определить по сигналам системы.
При выполнении полёта по маршруту в режиме «СРП» боковое уклонение от заданного маршрута может быть больше допустимого и сигнализация пролёта при проходе контрольных точек может не сработать.
4. Переключатель КППМ поставить в положение «Свод».
5. На КППМ установить значение ЗМПУ участка маршрута.
6. Развернуть самолёт на расчетный МК или МК=ЗМПУ и определить по вертикальной стрелке прибора КППМ положение ЛЗП относительно самолёта.
7. Пользуясь показаниями КППМ, вывести самолёт на ЛЗП.
8. Добившись устойчивого положения вертикальной стрелки КППМ в центре шкалы, заметить подобранный курс следования и подвести его с помощью ручки против треугольного индекса.
9. Осуществлять полёт по ЛЗП, удерживая вертикальную стрелку КППМ в центре шкалы.
10. Вести контроль пути по направлению и дальности. Контроль пути по направлению ведется наблюдением за положением вертикальной стрелки КППМ, а также сравнением текущей дальности и азимута с записанными на карте азимутом и дальностью для контрольных точек маршрута. Положение самолёта относительно ЛЗП определяется по отсчитанной дальности на ППДА в тот момент, когда текущий азимут соответствует азимуту контрольной точки.
Положение самолёта относительно ЛЗП можно определять не только в момент пролёта контрольных точек, для которых на карте указаны предвычисленные азимуты и дальности, но и в любой момент. В этом случае необходимо по текущим координатам, снятым с ППДА, нанести на карту отметку МС.
Если на БУ СРП установлены координаты опорной точки, то РСБН-2 позволяет определять в любой момент величину ЛБУ от ЛЗП. Для этого на БУ СРП ручку «Расстояние до цели» необходимо вращать до тех пор, пока вертикальная стрелка прибора КППМ не придёт в центр шкалы. Добившись прихода стрелки в центр шкалы, отсчитывают значение фактического расстояния по линии траверза и определяют ЛБУ.
Величина ЛБУ=Дф—Д0.т, когда радиомаяк слева и ЛБУ = До.т—Дф, когда радиомаяк справа. В этих формулах Дф—фактическое расстояние по линии траверза, отсчитанное в момент прихода стрелки на нуль; Д0.т — ранее установленное расстояние до опорной точки. Рассмотрим определение ЛБУ на примере.
На БУ СРП были установлены такие данные: ЗИПУ=52°, Ао.т—142°, До.т=60 км. После некоторого времени полёта стрелка КППМ отклонилась влево. Значит, самолёт уклонился вправо и удаление по линии траверза увеличилось. Чтобы определить фактическое расстояние по линии траверза, необходимо ручкой «Расстояние до цели» увеличивать расстояние до тех пор, пока вертикальная стрелка КППМ не окажется в центре шкалы. Пусть это произошло, когда расстояние оказалось равным 65,7 км. Следовательно, ЛБУ составляет +5,7 км.
В случае уклонения самолёта влево расстояние на БУ СРП нужно будет уменьшать. Знак ЛБУ проще определять по положению вертикальной стрелки КППМ перед тем, как определять величину ЛБУ.
Выполнение полёта параллельно ЛЗП
Полёт параллельно ЛЗП на заданном удалении от нее может выполняться по указанию службы движения или в случае возникшей для экипажа необходимости. Обычно такие полеты приходится производить на участках набора высоты или снижения, когда встречные самолёты разводятся по боковому интервалу, а также на участках обхода грозы.
В режиме «СРП» для выполнения полёта параллельно ЛЗП в случае, если за «цель» принята опорная точка, необходимо уменьшить или увеличить на БУ СРП расстояние до опорной точки на заданное удаление полёта от ЛЗП и пилотировать самолёт так, чтобы вертикальная стрелка КППМ находилась в центре шкалы прибора.
Если за «цель» был принят КПМ (ППМ), то необходимо перейти на пользование опорной точкой, для чего на БУ СРП установить азимут («угол цели») опорной точки, равный ЗИПУ±90°, а также дальность опорной точки («расстояние до цели»), которую необходимо увеличить или уменьшить на заданное удаление полёта от ЛЗП и затем продолжать полёт по КППМ в обычном порядке.
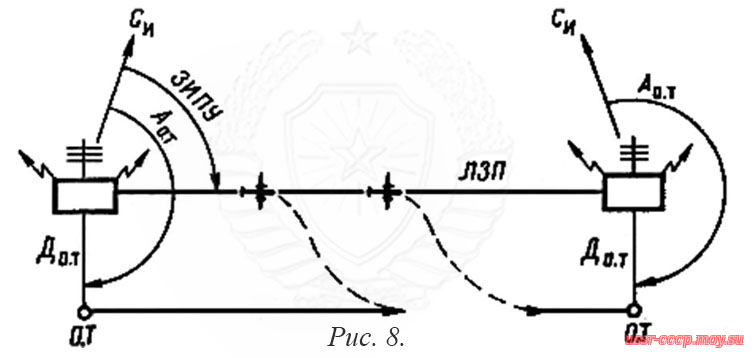
Рис. 8. Полёт параллельно ЛЗП, РСБН-2.
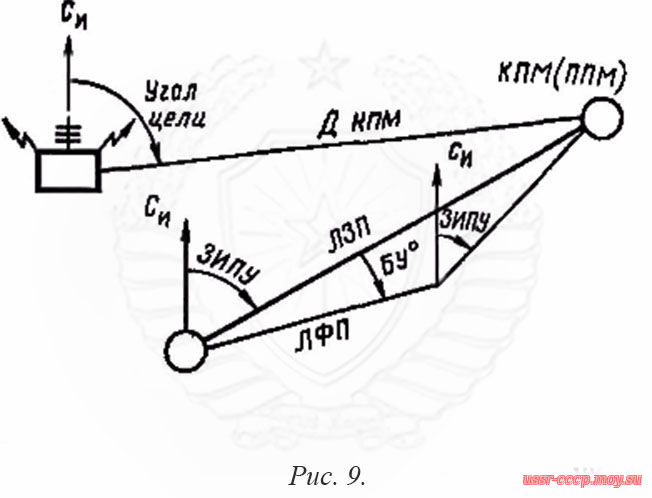
Рис. 9. Вывод самолёта в КПМ при уклонении от ЛПЗ, РСБН-2.
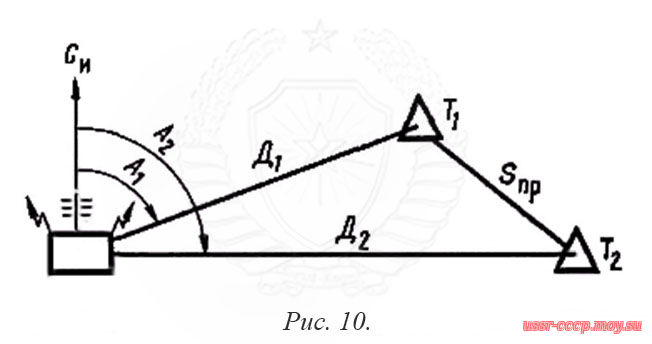
Рис. 10. Определение путевой скорости, РСБН-2.
Если полёт выполняется от радиомаяка или на радиомаяк, то для полёта параллельно ЛЗП необходимо:
1. Перейти на режим работы «СРП» и принять за «цель» опорную точку.
2. Установить на БУ СРП величину ЗИПУ данного участка маршрута.
3. Установить на БУ СРП «угол цели», равный ЗИПУ±90°. Знак плюс берется, когда необходимо полет выполнять правее ЛЗП, а знак минус — левее (рис. 8).
4. Установить на БУ СРП «Расстояние до цели», равное заданному удалению полёта от ЛЗП.
5. Выполнять полёт параллельно ЛЗП, используя КППМ.
Вывод самолёта в КПМ при уклонении от ЛЗП. В случае преднамеренного или получившегося уклонения самолёта от ЛЗП и необходимости выполнения полёта в КПМ (ППМ) или на КО самолёт на указанные пункты выводится с помощью КППМ (рис. 9).
Для вывода самолета в КПМ в режиме «СРП» необходимо:
1. Установить на БУСРП координаты точки выхода («Расстояние» и «Угол цели»).
2. Вращением ручки «ЗПУ» на БУ СРП привести вертикальную стрелку КППМ в центр шкалы, после чего отсчитать на шкале селектора новое значение ЗИПУ для вывода самолета в заданную точку. Перевести ЗИПУ в ЗМПУ.
3. Установить на КППМ против треугольного индекса значение полученного ЗМПУ и развернуть самолёт на МК = ЗМПУ.
4. Выполнять полёт по КППМ, удерживая вертикальную стрелку в центре шкалы прибора.
5. Определить момент выхода самолёта на КПМ по световым сигналам системы.
Определение навигационных элементов с помощью РБСН-2
РСБН-2 позволяет определять путевую скорость и угол сноса. Используя эти основные навигационные элементы, экипаж может определить ветер, по которому в случае необходимости выполняются расчёты для обеспечения самолётовождения за пределами рабочей области системы.
Определение путевой скорости при полёте на радиомаяк и от радиомаяка. Сущность определения путевой скорости с помощью РСБН-2 состоит в определении пройденного самолётом расстояния за известный промежуток времени. При полёте на радиомаяк или от радиомаяка для определения путевой скорости необходимо:
1. Отсчитать на ППДА дальность и пустить секундомер.
2. По истечению 1—2 мин полёта или большего промежутка времени вновь отсчитать на ППДА дальность.
3. По отсчитанным дальностям определить пройденный самолётом путь и рассчитать на НЛ-10М путевую скорость.
Для быстроты и удобства расчёт путевой скорости рекомендуется производить по изменению дальности за промежуток времени, равный 1 мин.
Определение путевой скорости при полёте по маршруту в режиме «СРП». При полёте по маршруту в режиме «СРП» путевая скорость определяется по времени и расстоянию между двумя отметками места самолёта. Для определения путевой скорости необходимо:
1. Отсчитать на ППДА азимут и дальность и пустить секундомер (рис. 10).
2. Через 5—10 мин полёта с постоянным курсом и скоростью снова отсчитать азимут и дальность и остановить секундомер.
3. Нанести на карту по отсчитанным координатам две отметки места самолёта, измерить расстояние между ними и рассчитать на навигационной линейке путевую скорость самолёта.
Для повышения точности расчёта путёвой скорости при полёте в режиме «СРП» рекомендуется определять путевую скорость по времени пролёта заранее намеченного отрезка пути. Для этого при подготовке к полёту намечают на маршруте отрезки протяженностью 50 или 100 км. Затем точно замеряют или вычисляют полярные координаты начала и конца каждого отрезка и записывают их на карте у проведенных меток. В воздухе засекают время пролёта намеченного отрезка пути, а затем по измеренному времени полёта и известному расстоянию рассчитывают путевую скорость.
Определение угла сноса. РСБН-2 позволяет определять угол сноса при полёте на радиомаяк и от радиомаяка, а также при полёте в режиме «СРП».
Угол сноса может определяться по курсу следования, подобранному для полёта по ЛЗП, и на контрольном этапе по отметкам места самолёта на карте.
При полёте по ЛЗП с помощью КППМ угол сноса определяется после подбора курса следования, т. е. когда вертикальная стрелка будет устойчиво находиться в центре шкалы прибора, определяется как разность между путевым углом и курсом, подобранным для полёта по ЛЗП, т.е.
УС = ФМПУ—МКсл
При положении вертикальной стрелки КППМ в центре шкалы стрелка курса при наличии сноса будет находиться правее или левее треугольного индекса, против которого установлено значение путевого угла. При отсутствии сноса стрелка курса совпадает с неподвижным треугольным индексом, при правом сносе она будет слева от треугольного индекса на величину угла сноса самолёта, а при левом сносе — справа.
Для определения угла сноса по отметкам места самолёта берется контрольный этап, длина которого должна быть не менее 50 км. Отметки места самолёта на карту наносят по отсчитанным координатам. Угол сноса определяется по ФМПУ и среднему значению МК полёта на контрольном этапе.
Использование РСБН-2 для захода на посадку
РСБН-2 при заходе на посадку позволяет:
1. Производить «вписывание» самолёта в установленную для данного аэродрома схему захода на посадку.
2. Осуществлять контроль полёта по установленной схеме.
3. Выводить самолёт в зону курсового радиомаяка.
Для решения указанных задач необходимо перед полётом изучить схему захода на посадку (рис. 11), на которую нанесены:
а) посадочный путевой угол и путевые углы для выполнения полёта по схеме захода, установленной на данном аэродроме;
б) контрольные точки с указанием их полярных координат, которые могут быть использованы для «вписывания» в схему и для контроля полёта по схеме захода;
в) опорные точки с указанием кх координат для обеспечения выполнения полёта по схеме в режиме «СРП»;
г) линия азимута от наземного радиомаяка для входа в зону курсового радиомаяка (КРМ).
При изучении схемы захода особое внимание обращается на установленный порядок «вписывания» в принятую схему захода и порядок выхода в зону КРМ.
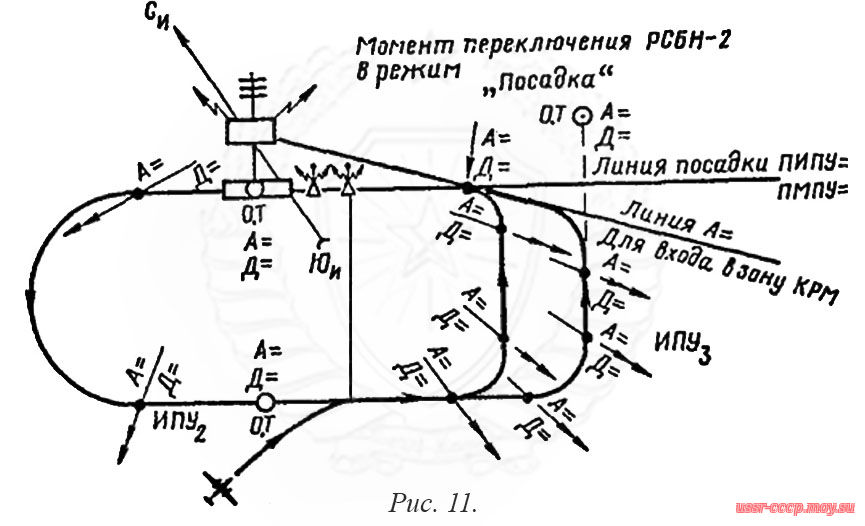
Рис. 11. Использование РСБН-2 для захода на посадку.
Для выполнения захода на посадку с помощью РСБН-2 необходимо:
1. Вывести самолет с помощью КППМ и ППДА в точку, намеченную для «вписывания» в схему захода. Вывод самолёта в заданную точку
осуществляется в режиме «СРП» и не отличается от обычного полёта по трассе в режиме «СРП». Манёвр захода строится путём последовательного выхода с помощью РСБН-2 к заданным точкам. Необходимые для этого данные указаны на схеме захода.
2. По сигналу «Пролёт» или в момент, когда координаты на ППДА будут соответствовать координатам намеченной точки, выполнить разворот и «вписаться» в установленную для данного аэродрома схему захода.
3. Выполнить дальнейший полет по схеме по расчетным данным обычным методом, контролируя его по показаниям ППДА.
4. Выйти к точке начала четвёртого разворота, определить его начало по ППДЛ и выполнить вход в зону ДРМ.
Чтобы упростить работу экипажа и повысить точность входа в зону КРМ, применяют промежуточный этап. В этом случае необходимо:
- а) заблаговременно до подхода к точке четвёртного разворота переключатель КППМ поставить в положение «СП-50», проверить работу посадочной аппаратуры и отбалансировать нуль курсового приёмника системы СП-50.
- б) после проверки работы посадочной аппаратуры переключатель КППМ перевести в положение «Свод»;
- в) установить на щитке управления штурмана режим работы «Азимут на» и значение азимута, обеспечивающего полёт на маяк РСБН-2. Линия азимута на схеме обычно проведена так, что она проходит через точку, находящуюся на оси ВПП и удаленную от ее начала не менее чем на 12 км;
- г) установить на КППМ против треугольного индекса значение ПМПУ;
- д) выйти с помощью КППМ на линию азимута и выполнять полет на маяк, удерживая вертикальную стрелку КППМ в центре шкалы прибора;
- е) в момент, когда текущая дальность на ППДА будет соответствовать дальности заданной точки, находящейся на оси ВПП, переключить РСБН-2 в режим посадки, для чего переключатель КППМ поставить в положение «СП-50».
При использовании специальных курсовых и глиссадных маяков РСБН-2 в режим посадки включается установкой переключателя режима работы в положение «Посадка».
- ж) после переключения РСБН-2 в режим посадки дальнейший полет выполняется в обычном порядке по курсовому и глиссадному радиомаякам СП-50.
6. Подготовка к полету с использованием РСБН-2
Опыт использования РСБН-2 показывает, что достаточно полная реализация возможностей этой системы прежде всего зависит от заблаговременной подготовки данных для её применения и оперативности работы экипажа в полёте, поэтому экипажи самолётов, на которых установлена аппаратура РСБН-2, обязаны в период предварительной подготовки к полёту подготовить по всем участкам трассы необходимые данные, обеспечивающие эффективное применение системы для самолётовождения в полёте. Такая подготовка освобождает экипаж от вычислений в воздухе и позволяет ему больше внимания уделять оперативности своей работы.
Таблица 2 (пункты условные).
План использования системы РСБН-2
| Пункты маршрута |
Наименование радиомаяка |
Азимут (А), град |
Дальность (орбита), км |
Режим работы |
ОЗИПУ, град |
S, км |
ЛУР, км |
| Орловск |
Орловск |
|
|
«Азимут от» |
|
|
|
| Москва |
Орловск |
|
|
«Азимут от» |
|
|
|
| Калинин |
Орловск |
|
|
«Азимут от» |
|
|
|
| Ленинград |
Орловск |
|
|
«СРП» |
|
|
|
| Сталинград |
Орловск |
|
|
«СРП» |
|
|
|
Если штурман не имеет в своем распоряжении для нужной трассы полёта таблиц с готовыми данными для использования РСБН-2, необходимо:
1. Нанести на полётную карту по координатам все предполагаемые к использованию наземные маяки системы. Провести через точки установки наземных маяков истинные меридианы и линии азимутов 90 и 270°.
Точки установки наземных радиомаяков должны быть нанесены с высокой точностью, так как допущенная при этом ошибка будет сказываться на точности определения всех предвычисленных данных.
2. Определить ортодромические путевые углы по участкам маршрута, приняв в качестве опорного меридиан, проходящий через наземный радиомаяк, предполагаемый для использования.
3. Наметить на ЛЗП контрольные точки для осуществления в полёте контроля пути. Измерить для этих точек, а также для ИПМ, ППМ и КПМ азимуты и дальности от наземного радиомаяка и записать их на карте у точек или пунктов, к которым эти данные относятся (рис. 12).

Рис. 12. Разметка карты (пункты условные), РСБН-2.
4. Определить по крупномасштабной карте или рассчитать по формулам исходные данные для участков маршрута, где предполагается применять режим работы «СРП».
5. На участках, где полет будет выполняться в режиме «СРП», разбить ЛЗП на 50- или 100-километровые отрезки для определения путевой скорости и записать у меток их полярные координаты.
6. Рассчитать ЛУР для обеспечения выхода на ЛЗП во всех изломах маршрута.
7. Составить план использования системы и свести полученные расчётные данные в специальный бланк (табл. 2).
Применение РСБН-2 не меняет установленного порядка самолётовождения. Поэтому подготовка к полёту с использованием системы должна проводиться в полном объеме в соответствии с требованиями - Наставления штурманской службы и той специальной дополнительной подготовки, объем которой был изложен выше.
Проверка работоспособности самолётного оборудования РСБН-2 и калибровка шкал ППДА
Проверка работоспособности самолётного оборудования РСБН-2 выполняется в таком порядке:
1. Произвести внешний осмотр щитков управления и приборов системы, установленных на самолёте.
2. Убедиться, что горизонтальная и вертикальная стрелки КППМ находятся в нулевом положении. Если они отклонены от нулевого положения, техник по РЭСОС с помощью винтов с надписью «К» и «Г» на КППМ должен установить их в нулевое положение. Указанные винты предназначены для установки механического нуля.
3. Включить самолётное оборудование системы за 5—6 мин до начала проверки, для чего АЗС с надписью «Свод» поставить в положение «Включено».
4. Переключатель КППМ поставить в положение «Свод».
5. Установить на щитке управления штурмана номер канала радиомаяка и убедиться в правильности его путём прослушивания позывных.
6. Установить необходимый по плану полёта режим работы («Азимут», «Орбита», «СРП»).
7. Проверить работоспособность самолётного оборудования системы по бленкеру вертикальной стрелки КППМ и по сигнальным лампочкам неисправности каналов дальности и азимута.
После включения системы в течение 2—5 мин блоки измерения азимута и дальности находятся в режиме «поиска» сигналов радиомаяка. В этом режиме на ППДА стрелки азимута и диски счётчика дальности находятся в движении, курсовой бленкер открыт (видны белые секторы) и сигнальные лампочки канала дальности и азимута горят.
После «захвата» сигналов радиомаяка курсовой бленкер на КППМ закрывается, образуя черное сплошное поле, а сигнальные лампочки каналов дальности и азимута гаснут. Одновременно с этим на ППДА стрелки азимута укажут А, а счётчик дальности — дальность от наземного радиомаяка до самолёта.
Чтобы исключить возможные ошибки в измерении дальности и азимута, необходимо после окончания режима «поиска» откалибровать шкалу азимута, счетчик дальности и длительность стробирующего импульса.
Калибровка шкал ППДА.
В системе предусмотрена возможность проверки правильности отсчета азимута и дальности и при несоответствии начала отсчета — возможность установки условного нулевого значения азимута и дальности.
Проверка правильности начала отсчета и калибровка шкал азимута и дальности производится с помощью двух кнопок, имеющих общую надпись «Контроль нуля». Рядом с левой кнопкой стоит надпись «А» и «Длит, строба», а рядом с правой—«Д».
Для калибровки шкал ППДА необходимо:
1. Нажать на кнопку «Контроль нуля А», при этом стрелка точной шкалы азимута ППДА должна прийти во вращение и установиться на контрольной цифре 1° точной шкалы. Если стрелка не установится на контрольном делении, то необходимо добиться этого плавным вращением нажатой кнопки.
Проверка установки нуля азимута осуществляется в любом десятке. Это значит, что при нажатии кнопки «Контроль нуля А», механизм отработает 1° по точной шкале, а показание грубой шкалы останется в том же десятке.
2. Нажать на кнопку «Контроль нуля Д», при этом два правых диска счётчика дальности должны начать вращаться и установиться в положение «2,0 км». Если счётчик не установится в это положение, то плавным поворотом нажатой кнопки добиться, чтобы два правых диска указывали дальность «2,0 км». При нажатии кнопки «Контроль нуля Д» схема измерения дальности отработает «2,0 км»в любом десятке, а значение сотен километров остаётся без изменения.
3. Проконтролировать и отрегулировать длительность стробирующего импульса. Контроль и установка длительности стробирующего импульса в заданные пределы осуществляются левой кнопкой, которая использовалась для контроля нуля азимута. Для проверки длительности стробирующего импульса необходимо оттянуть на себя кнопку «Контроль нуля А» и «Длит, строба», при этом стрелка азимута грубой шкалы ППДА должна показать азимут менее 10°, а стрелка точной шкалы должна остановиться между 4 и 5°. Если стрелка точной шкалы азимута не установится в указанном положении, то плавным вращением оттянутой на себя кнопки установить стрелку между 4 и 5°. Когда наземный радиомаяк не работает, то для получения общего представления о работоспособности самолётного оборудования необходимо произвести предварительную проверку с обязательной последующей проверкой при работающем радиомаяке в соответствии с требованиями, изложенными выше.
При неработающем радиомаяке предварительная проверка канала азимута осуществляется переключением режима работы сначала в положение «Посадка», а затем в любое другое положение; при этом стрелка азимута ППДА, если канал азимута исправен, будет скачкообразно изменять своё положение. Если же канал азимута неисправен, то стрелка азимута на приборе ППДА при переключении режима работ своего положения не изменит. Предварительная проверка канала дальности при неработающем маяке выполняется так же, как и при работающем.
После проверки работоспособности самолетного оборудования РСБН-2 и калибровки шкал штурман приступает к использованию системы в соответствии с заранее составленным планом.
Материалы
Орлов Г.В. «РПСН-2 — Радиолокационная станция предупреждения столкновений и навигации» (повествование 07.07.2023).
Источник
https://ussr-cccp.moy.su/index/aviacija_sssr/0-10
https://ussr-cccp.moy.su/publ/aviacija_sssr/oborudovanie_samoljotov_sssr/oborudovanie_
samoljotov_sssr/218-1-0-585
Источник: https://ussr-cccp.moy.su/publ/aviacija_sssr/oborudovanie_samoljotov_sssr/oborudovanie_samoljotov_sssr/218-1-0-585 |